LuisQ
Leyenda
Como complemento a la última foto del post anterior.
El sistema consta de tres partes principales, el Captador de datos donde se conectan los diferentes sensores, el Transmisor de radio que va conectado al anterior y que lleva una antena y el Monitor-Receptor que recibe las señales y las presenta secuencialmente en su pantalla. Este Receptor puede estar conectado en el campo con un PC via USB o puede almacenar en memoria la información y descargarla en el PC posteriormente. La casa suministra un software configurable a las necesidades de cada usuario y cada aparato y es este SW el que monitoriza en la pantalla del PC toda la información que recibe.
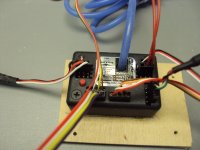
En la foto 887 se ve el Captador con unos conectores similares a los de los receptores RC donde van conectados los diferentes sensores. La única excepción es el tubo azul central que es el que mide la velocidad del modelo por ir su extremo apuntando a proa y por diferente presión bien del aire o del agua mide la velocidad.
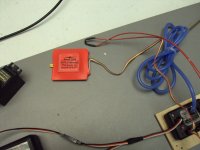
En 886 se ve de nuevo el Captador con el Transmisor conectado y que lleva una antena en su extremo y el Monitor- Receptor también con su antena. Este monitor lógicamente no va en el barco si no sujeto a la emisora RC. A la izquierda del Captador se ve conectado un cable en Y de forma que uno de sus ramas va a un servo y la otra, libre en este momento, se conectará al canal del receptor RC que esté asignado a este servo, por ejemplo el timón. En la parte superior del captador se ve un cable con una "pastilla roja" que es un GPS encargado de mandar las coordenadas del barco así como la distancia al piloto e incluso controla también la velocidad. A la derecha de este cable tenemos otro que es una sonda termométrica para bajas temperaturas, por ejemplo la de los tubos de vapor. Y entre esos dos cables el tubo de plástico azul en cuyo extremo está un tubo de latón que se sujetará en dirección de la proa del modelo para medir la velocidad por presión de aire o agua.
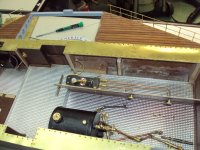
En 888 tenemos tres sensores, el inferior es magnético. A su izquierda se ven 4 pequeños imanes de los que dos deben pegarse al eje del motor o a un volante del mismo poniendose el sensor a un mm de distancia para que al girar detecte el imán y controle las RPM. Encima de este hay otro sensor, metido en un marco de madera que he preparado para su sujección, esta vez óptico. Hay que pintar en un eje o volante marcas blancas y negras y aproximar el sensor a la zona pintada. Supuestamente mide la RPM al paso del negro al blanco. A la derecha de la foto una sonda termostática para 2000ºF que son más o menos 1100ºC y que voy a meter en el hogar de la caldera al lado del quemador.
He olvidado indicar que el Monitor-Receptor es progamable de forma que cuando reciba una señal determinada de un aviso-pitido de alarma. De esa forma si se apaga el quemador de la caldera la temperatura bajará alrededor de los 100ºC y me avisará de que tengo que traer a puerto el barco antes de que se acabe el vapor en la caldera. también me avisará si la alimentación de los servos baja de un determinado valor.
En 889 dos tipos de sensores de temperaura diferentes y un sensor medidor del voltaje y carga de la batería. También el Transmisor comentado antes con su antena.
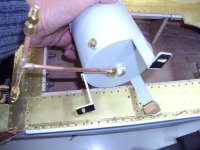
En 890 una foto más detallada del GPS.
Como ya he dicho todo lo anterior está probado de forma preliminar pero no todo funciona a mi gusto ni siquiera estoy seguro todo lo hará alguna vez (tengo grandes dudas respecto al sensor óptico pues pienso, aunque no lo indica el manual, que está previsto para motores mucho más revolucionados que los de vapor).
El sistema consta de tres partes principales, el Captador de datos donde se conectan los diferentes sensores, el Transmisor de radio que va conectado al anterior y que lleva una antena y el Monitor-Receptor que recibe las señales y las presenta secuencialmente en su pantalla. Este Receptor puede estar conectado en el campo con un PC via USB o puede almacenar en memoria la información y descargarla en el PC posteriormente. La casa suministra un software configurable a las necesidades de cada usuario y cada aparato y es este SW el que monitoriza en la pantalla del PC toda la información que recibe.
En la foto 887 se ve el Captador con unos conectores similares a los de los receptores RC donde van conectados los diferentes sensores. La única excepción es el tubo azul central que es el que mide la velocidad del modelo por ir su extremo apuntando a proa y por diferente presión bien del aire o del agua mide la velocidad.
En 886 se ve de nuevo el Captador con el Transmisor conectado y que lleva una antena en su extremo y el Monitor- Receptor también con su antena. Este monitor lógicamente no va en el barco si no sujeto a la emisora RC. A la izquierda del Captador se ve conectado un cable en Y de forma que uno de sus ramas va a un servo y la otra, libre en este momento, se conectará al canal del receptor RC que esté asignado a este servo, por ejemplo el timón. En la parte superior del captador se ve un cable con una "pastilla roja" que es un GPS encargado de mandar las coordenadas del barco así como la distancia al piloto e incluso controla también la velocidad. A la derecha de este cable tenemos otro que es una sonda termométrica para bajas temperaturas, por ejemplo la de los tubos de vapor. Y entre esos dos cables el tubo de plástico azul en cuyo extremo está un tubo de latón que se sujetará en dirección de la proa del modelo para medir la velocidad por presión de aire o agua.
En 888 tenemos tres sensores, el inferior es magnético. A su izquierda se ven 4 pequeños imanes de los que dos deben pegarse al eje del motor o a un volante del mismo poniendose el sensor a un mm de distancia para que al girar detecte el imán y controle las RPM. Encima de este hay otro sensor, metido en un marco de madera que he preparado para su sujección, esta vez óptico. Hay que pintar en un eje o volante marcas blancas y negras y aproximar el sensor a la zona pintada. Supuestamente mide la RPM al paso del negro al blanco. A la derecha de la foto una sonda termostática para 2000ºF que son más o menos 1100ºC y que voy a meter en el hogar de la caldera al lado del quemador.
He olvidado indicar que el Monitor-Receptor es progamable de forma que cuando reciba una señal determinada de un aviso-pitido de alarma. De esa forma si se apaga el quemador de la caldera la temperatura bajará alrededor de los 100ºC y me avisará de que tengo que traer a puerto el barco antes de que se acabe el vapor en la caldera. también me avisará si la alimentación de los servos baja de un determinado valor.
En 889 dos tipos de sensores de temperaura diferentes y un sensor medidor del voltaje y carga de la batería. También el Transmisor comentado antes con su antena.
En 890 una foto más detallada del GPS.
Como ya he dicho todo lo anterior está probado de forma preliminar pero no todo funciona a mi gusto ni siquiera estoy seguro todo lo hará alguna vez (tengo grandes dudas respecto al sensor óptico pues pienso, aunque no lo indica el manual, que está previsto para motores mucho más revolucionados que los de vapor).