

Hola Foro,
Trataremos de dar larga exposición a las maniobras de este tipo de embarcación, que aún siendo un número mínimo, no deja de ser complejo en la navegación.
Pit i Amunt.
MANIOBRAS
MANIOBRAS
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo
servos para velas
Hola Foro,
Esta conversación ya la hemos tenido pero no recuerdo donde he dejado los apuntes.
Tras realizar búsquedas y leer lo que he encontrado, tenemos mas o menos esto. A falta de llamar hoy a Anguera en Reus, que tiene de Graupner un servo con carrete.
1) Servos normales que se pueden convertir a
a) Giro de 180º
b) Giro infinito a un lado y otro, al que se le puede acoplar un carrete de hilo de costura
2) Servos para Escotas, que con polea de reenvío puedes hacer un recorrido a lo largo de una de las longitudes del lazo.
3) Servos con carrete, pero ignoro ahora su funcionamiento.
De otra al parecer el problema que dan los servos con carrete es el de al quedar el hilo sin tensión por cambio de viento en la vela, el hilo tiende a reliarse en si mismo o en el carrete.
Dejo abierto el debate para el que tenga experiencia en esto o tenga alguna idea lo manifieste.
Gracias.
Pit i Amunt
Esta conversación ya la hemos tenido pero no recuerdo donde he dejado los apuntes.
Tras realizar búsquedas y leer lo que he encontrado, tenemos mas o menos esto. A falta de llamar hoy a Anguera en Reus, que tiene de Graupner un servo con carrete.
1) Servos normales que se pueden convertir a
a) Giro de 180º
b) Giro infinito a un lado y otro, al que se le puede acoplar un carrete de hilo de costura
2) Servos para Escotas, que con polea de reenvío puedes hacer un recorrido a lo largo de una de las longitudes del lazo.
3) Servos con carrete, pero ignoro ahora su funcionamiento.
De otra al parecer el problema que dan los servos con carrete es el de al quedar el hilo sin tensión por cambio de viento en la vela, el hilo tiende a reliarse en si mismo o en el carrete.
Dejo abierto el debate para el que tenga experiencia en esto o tenga alguna idea lo manifieste.
Gracias.
Pit i Amunt
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo

-
Joaquin Yarza

- Fundador

- Mensajes: 2629
- Registrado: Lun Ene 24, 2005 7:28 pm
Echale un vistazo a esta disposicilón de servos
http://www.modelismonaval.com/foro/inde ... c&start=10
http://www.modelismonaval.com/foro/inde ... c&start=10
a ver si lo entiendo Joaquin,es un circuito cerrado y siempre se mantiene tensado solo hay que atar las escotas y estas se desplazan a lo largo del barco,el problema es que debo de colocar las poleas lo más separadas ,o sea en la proa y en la popa asi conseguiria uno 70 o 80 cm de desplazamiento...........mentira sería la mitad porque el punto neutro sería el centro de la barca,creo que sería asi 
saludos Guillermo
saludos Guillermo
tutto il giorno che lavora come un cavallo ed alla notte per mangiare come una gallina guasto
-
Joaquin Yarza
- Fundador
- Mensajes: 2629
- Registrado: Lun Ene 24, 2005 7:28 pm
maniobras y sus aparejos
Hola Foro,
Vamos a tratar de explicar la mecánica de la vela latina y su aparejo; a partir de esta exposición podremos desarrollar los elementos que gobiernen dicha vela.
Lo dicho para el Árbol, Mástil principal sirve para el de Mitjana (Mesana), en cuanto a palos se refiere. Cada uno consta de una Mástil y una Entena (Verga), esta última formada por dos piezas llamadas Car y Pena, que cruzándose un tramo la una en la otra se amarran por dos los extremos de cada una que quedan en el cuerpo medio de la otra.
Esta verga, la Entena, colgada en un solo punto del Palo, hacen posible que la vela pueda tener cualquier orientación con respecto a la línea de crujia, línea imaginaria que cruza de roda a roda por el centro de la cubierta. Tanto en alza como en deriva, unido esto al hecho que el Palo no está obencado ni tiene estays; hacen posible que la Entene pueda girar enrededor del Palo. Haciendo una navegación con infinita formas de tender el trapo al viento.
Según los autores mencionados en otros Post, hacen falta siete maniobras para el manejo completo de la vela latina. De estas solo cinco son principales y las dos restantes auxiliares. Y aunque el estudio detallado de cada una de ellas es mas complejo que el propósito de esta exposición, se enumerarán con la función principal de cada una de ellas, sin entrar en pormenores de las partes que componen cada una, excepto en los caso que por mor a la explicación fuera necesario.
Principales:
Auxiliares:
Existen dos maniobras auxiliares mas, que solo se han de citar.
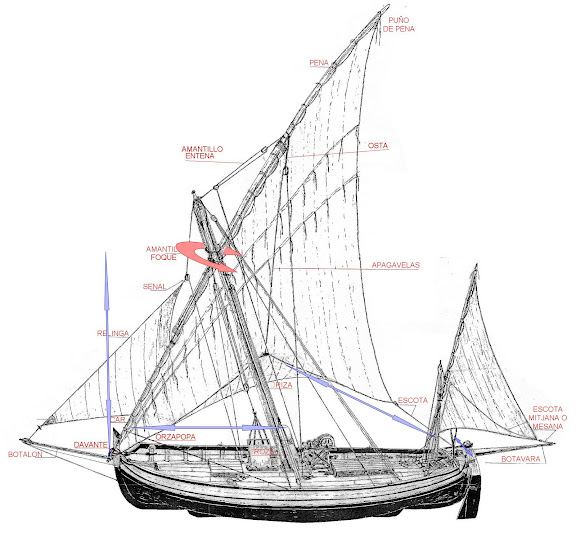
Las flechas azules son los movimientos de las tres maniobras y el timón. La circular roja es el movimiento de 360º de la Entena alrededor del Mástil
Para el propósito de nuestro modelo solo necesitaremos las cinco maniobras principales, distinguiendo de ellas las fijas y las móviles.
Las dos primeras, la Driza y la Troza, como se deriva de lo explicado irán graduadas y fijas en el momento de largar la barca al agua, con la consiguiente evaluación del tiempo, viento, y demás circunstancias climatológicas del día de la singladura.
Las otras tres, el Devante, la Orzapopa, y la Escota, tienen cada una de ellas su particular hacer o comportamiento que hará que el desarrollo de los elementos de su gobierno (servos) sean a su vez de particular diseño.
Del sistema "lazo cerrado" descrito por referencias por Yarza en anterior post, habría que realizar tres independientes, pues las tres son independientes. Esto haría un intrincado sistema de poleas debajo de cubierta.
Al mismo tiempo las longitudes de cada maniobra viene descrito por su movimiento, resultando que el Devante deberá ser como mínimo su desplazamiento la altura del pie de Mástil a la Cruz. La Orzapopa, deberá tener una longitud de la Roda de Proa a la base del Mástil. Y por último la Escota según los autores deberá de ser algo mas larga que la Entena.
De usar los servos de carrete para velas, evitando los posibles y desafortunados enrollamientos del hilo, sería posible ubicar uno lo mas próximo a Proa, para el Devante; un segundo servo por detrás de la carlinga del pie de Mástil, que emergiendo a la cubierta llegue a una polea puesta en la Orla de la banda, y de ahí a su amarre en el Car. Cada banda deberá de portar esta pequeña polea o en su defecto Ojal metálico, pues unas veces interesara que la Orzapopa este a babor y otras a estribor; pues al quedar sotaventada daña al trapo.
Por último para la Escota, que a mi modesto entender es la mas proclive a enredarse, pues está mas afecta a los cambios de viento o de giro de la barca y por tanto a que quede destensada; en ésta maniobra si que interesaría poner el sistema de lazo cerrado.
Y hasta aquí mi ciencia, ahora queda abierto el debate, ahora es vuestro turno.
Pit i Amunt.
Vamos a tratar de explicar la mecánica de la vela latina y su aparejo; a partir de esta exposición podremos desarrollar los elementos que gobiernen dicha vela.
Lo dicho para el Árbol, Mástil principal sirve para el de Mitjana (Mesana), en cuanto a palos se refiere. Cada uno consta de una Mástil y una Entena (Verga), esta última formada por dos piezas llamadas Car y Pena, que cruzándose un tramo la una en la otra se amarran por dos los extremos de cada una que quedan en el cuerpo medio de la otra.
Esta verga, la Entena, colgada en un solo punto del Palo, hacen posible que la vela pueda tener cualquier orientación con respecto a la línea de crujia, línea imaginaria que cruza de roda a roda por el centro de la cubierta. Tanto en alza como en deriva, unido esto al hecho que el Palo no está obencado ni tiene estays; hacen posible que la Entene pueda girar enrededor del Palo. Haciendo una navegación con infinita formas de tender el trapo al viento.
Según los autores mencionados en otros Post, hacen falta siete maniobras para el manejo completo de la vela latina. De estas solo cinco son principales y las dos restantes auxiliares. Y aunque el estudio detallado de cada una de ellas es mas complejo que el propósito de esta exposición, se enumerarán con la función principal de cada una de ellas, sin entrar en pormenores de las partes que componen cada una, excepto en los caso que por mor a la explicación fuera necesario.
Principales:
- La Drissa, la driza cuya función principal es izar la Entena.
La Trossa, la troza es la que sujeta firme al Entena al Palo por la cruz, y de otra sujeta el Palo firmemente contra los golpes del mar.
El Devant, el devante que sujeta el Puño del Car, extremo proel de la Entena, haciendo que ésta bascule hasta quedar o bien próximo a la Roda de Proa, o a la altura de la cruz posicionándola como una verga de vela ronda o cuadrada.
El Orsapop, la orzapopa amarrada al Car, a una distancia de unos treinta centímetros del devante, maniobra junto a éste la Entena, posicionándola en el ángulo y altura deseado.
La Escota, la mas popular, que afirmado en el puño de escota de la vela, controla el embolsamiento de la vela y la variación de su centro.
Auxiliares:
- La Osta, se afirma a la Entena en la Pena, junto al amarre popel de ésta con el Car. Junto a la Orzapopa afirman la Entena con vientos fuertes, en otro caso no hace falta.
La Amantina, el amantillo de la Entena, también se usa ocasionalmente para preservar la Entena de la acción de fuerte mar, y los golpes derivados del oleaje. Se afirma en la Pena, junto a la Osta, pasa por un cuadernal que pende del Espigó del tope del Mástil, bajando hasta el pie del Palo, afirmándose a una cornamusa de cubierta. Como vemos esta junto a la Osta preservan a la Entena de esfuerzos mayores.
Existen dos maniobras auxiliares mas, que solo se han de citar.
- La Traba de la Entena, cuya misión es al de sujetar la Entena al Palo en situaciones particulares como la de tomar rizos, o envergar la Entena.
El Senal o apagaveles, El cenal sirve para desventar el trapo sin necesidad de arriar la Entena.
Las flechas azules son los movimientos de las tres maniobras y el timón. La circular roja es el movimiento de 360º de la Entena alrededor del Mástil
Para el propósito de nuestro modelo solo necesitaremos las cinco maniobras principales, distinguiendo de ellas las fijas y las móviles.
Las dos primeras, la Driza y la Troza, como se deriva de lo explicado irán graduadas y fijas en el momento de largar la barca al agua, con la consiguiente evaluación del tiempo, viento, y demás circunstancias climatológicas del día de la singladura.
Las otras tres, el Devante, la Orzapopa, y la Escota, tienen cada una de ellas su particular hacer o comportamiento que hará que el desarrollo de los elementos de su gobierno (servos) sean a su vez de particular diseño.
Del sistema "lazo cerrado" descrito por referencias por Yarza en anterior post, habría que realizar tres independientes, pues las tres son independientes. Esto haría un intrincado sistema de poleas debajo de cubierta.
Al mismo tiempo las longitudes de cada maniobra viene descrito por su movimiento, resultando que el Devante deberá ser como mínimo su desplazamiento la altura del pie de Mástil a la Cruz. La Orzapopa, deberá tener una longitud de la Roda de Proa a la base del Mástil. Y por último la Escota según los autores deberá de ser algo mas larga que la Entena.
De usar los servos de carrete para velas, evitando los posibles y desafortunados enrollamientos del hilo, sería posible ubicar uno lo mas próximo a Proa, para el Devante; un segundo servo por detrás de la carlinga del pie de Mástil, que emergiendo a la cubierta llegue a una polea puesta en la Orla de la banda, y de ahí a su amarre en el Car. Cada banda deberá de portar esta pequeña polea o en su defecto Ojal metálico, pues unas veces interesara que la Orzapopa este a babor y otras a estribor; pues al quedar sotaventada daña al trapo.
Por último para la Escota, que a mi modesto entender es la mas proclive a enredarse, pues está mas afecta a los cambios de viento o de giro de la barca y por tanto a que quede destensada; en ésta maniobra si que interesaría poner el sistema de lazo cerrado.
Y hasta aquí mi ciencia, ahora queda abierto el debate, ahora es vuestro turno.
Pit i Amunt.
- Adjuntos
-
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo
Conversión de servo
Hola Foro,
tras efectuar la búsqueda de servos para escotas o velas, hemos encontrado varias soluciones. De entre todas nos despertó la curiosidad la convertir un servo de giro limitado a 60 o 180 º, en otro que gire en uno u otro sentido indefinidamente, a capricho del patrón.
Un servo básicamente es un motor que en su eje presenta un piñón solidario a una serie de engranajes, gobernado eléctricamente por una placa electrónica, a la que llegan tres cables del receptor, estos son rojo/negro alimentación de las baterías, el tercero de color blanco o amarillo u otro distinto a los anteriores según el fabricante que es la señal de gobierno, esta señal es interpretada por la placa y hace que el motor gire en uno u otro sentido de giro. Obviamente están en paralelo todos los servos y el receptor; en algún caso el receptor tiene alimentación independiente, por motivos de seguridad de sobre tensiones.
El giro del piñón puede ser según modelos de 60º, 180º o de varias vueltas (360º) en uno u otro sentido, para realizar la limitación de los primeros el piñón que sobresale de la carcasa que es el último de la serie de engranajes descritos, porta en su base un tetón o tope que incide en un resalte interior de la carcasa y lo para. Al mismo tiempo en la parte interna de este piñón hay un hueco a modo de aleta donde se aloja un elemento que ira solidario a este engranaje y al mismo tiempo transmite el giro al eje de mando de un potenciómetro lineal de unos 5 k ohmios.
Sin entrar en doctas disquisiciones electrónicas, comentaremos que un potenciómetro lineal de tres contactos es simplemente un divisor de tensión, llamamos ABC a los tres contactos, siendo A y C los extremos de una resistencia y B un contacto flotante a lo largo de este resistor. Entre AC tendremos una caída de tensión o diferencia de potencial de Vac fija, entre cada uno de los extremos y el contacto central B, habrá por tanto una Vab y una Vbc de tal manera que la suma de estas dos sea la total, mas gráficamente Vab + Vbc = Vac
La forma de reflejar esto de manera física, es que Vab tendrá valor 0 voltios cuando el potenciómetro este girado totalmente hacia el contacto A. Conforme giramos el potenciómetro hacia el contacto C, la tensión Vab irá creciendo hasta adquirir la tensión total o Vac.
Estos distintos valores de tensión en el contacto B hacen que el circuito integrado anexo "conozca" en que punto del giro se encuentra el servo. 0 voltios girado totalmente a un extremo, con Vac/2 (la mitad del valor de la tensión total) se encuentra en el punto central del recorrido, y con el valor Vac (tensión máxima que puede adquirir) el servo se encuentra girado al extremo contrario del de partida. Si algo no ha quedado muy claro, no dudar en preguntar y ampliamos el concepto.
Tras la teoría pasemos a la práctica, pues siempre ha sido mas fácil tocar que imaginar, si sabemos donde. Se trata de sustituir un potenciómetro de resistencia variable por dos resistencias fijas que nos mantengan siempre fijo el valor de tensión en el punto B. Como el potenciómetro presenta un valor de 5000 Ohm (5k) al dividir por dos tendremos un valor de dos resistencias de 2500 ohm, como industrialmente se fabrican con valores de 2k2 o 2k7, elegimos las menores las de 2200 ohm, cuyo código de colores es rojo, rojo, rojo, oro/plata de 1/4 watio.
Los elementos a usar han sido un Transmisor (Tx) y un Receptor (Rx) Futaba, el primero de 4 canales y el segundo de 6; que aunque no es importante para el desarrollo expuesto, queda comentado sin mas. Y el servo Himodel S4115M, características de este último en http://www.himodel.com/radios/15Kg-cm_T ... 4115M.html , cortesía de Denetor ( www.acercamadera.com ), que me ha prestado el equipo mientras adquiero uno.



Como medida preventiva intercalaremos en serie un amperímetro entre la fuente de alimentación y el tandem formado por el receptor y el servo. Midiendo el consumo de corriente cuando accionamos el mando del Tx, estando el servo sin carga alguna, el engranaje libre. Así podremos comprobar que tras la manipulación todo seguirá igual en cuanto a los consumos por defectos de montaje, roces o cualquier otro error mecánico.
Al mismo tiempo desconectaremos y descohesionaremos los elementos entre si y eléctricamente para evitar dañar las partes electrónicas.

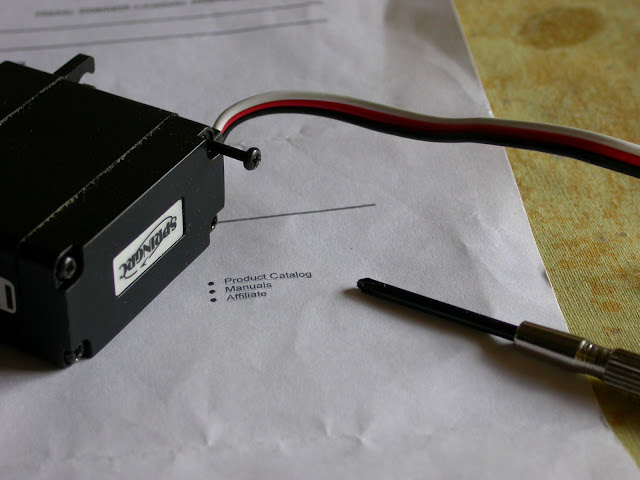
Abrimos el servo accionado en los cuatro tornillos pasantes del fondo del chasis.
[/img]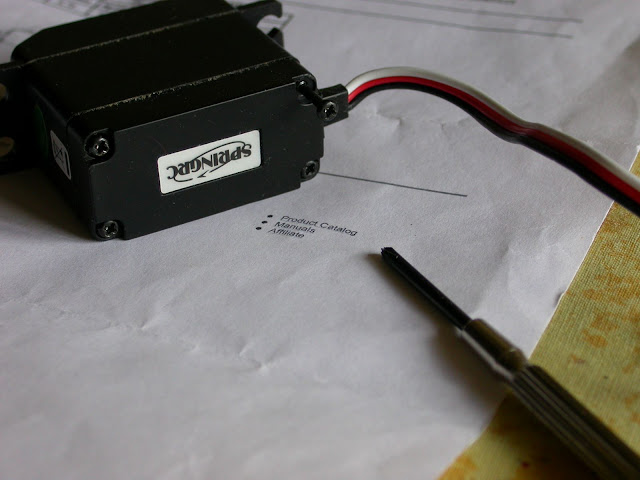
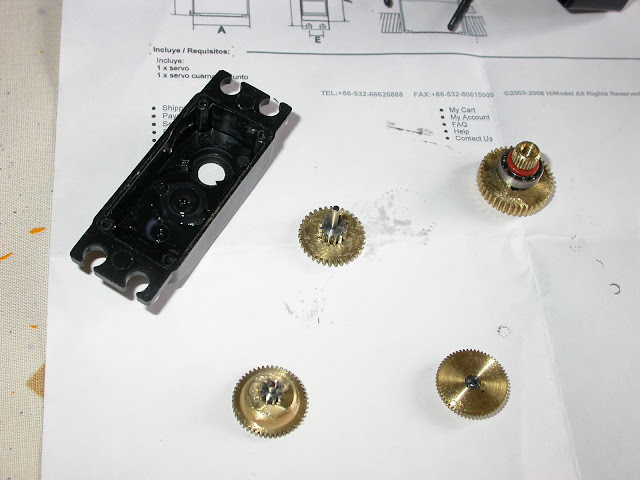
El chasis se despieza en tres elementos, tapa base, cuerpo central y cabezal. En el cuerpo se encuentra el motor, el potenciómetro y la circuitería electrónica, en el cabezal se encuentra el conjunto de engranajes.

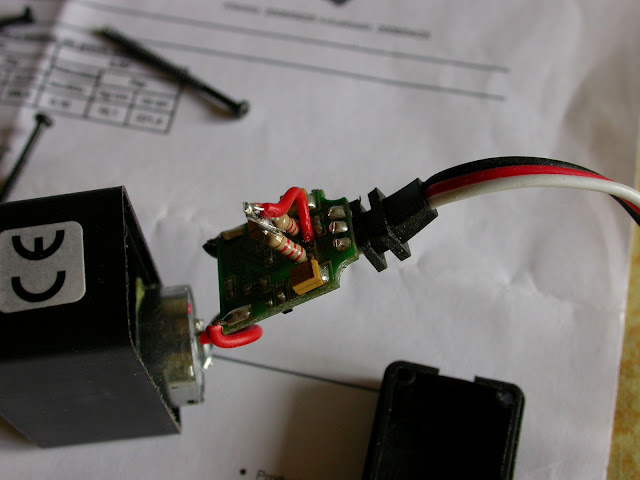
Vista de la electrónica y los tres puntos de soldadura del potenciómetro, mas concretamente

Se han resaltado con tres círculos en blanco, rojo y negro, por que así eran los colores de tres secciones diminutas de cablecillos que unían los puntos de soldadura con los tres contactos del potenciómetro. No confundir con los colores Blanco, Rojo y Negro de los cables que se ven en la parte superior que son la alimentación y el cable de señal como ya habíamos señalado anteriormente y no son equipotenciales los cables que llevan el mismo color, excepto el negro que hace de masa 0 voltios en todo el conjunto eléctrico de gobierno del barco, en este caso.
Fotografiamos o anotamos la posición de e cada uno de los engranajes para no llevarnos sorpresas posteriormente, y procedemos a sacar los engranajes de su ubicación.

Del engranaje último, el que se conecta al brazo exterior, cortamos el tetón que porta en la parte interna superior, en la imagen se señala la posición donde se encontraba antes de cortar.
Listo para montar de nuevo.

Comprobemos que el engranaje exterior acciona el giro de todo el conjunto de manera suave y correctamente.
Despiece del conjunto del potenciómetro, a la izquierda el engranaje, la pieza de plástico que transmite el giro, un rodamiento y el potenciómetro; se ven perfectamente los tres contactos desoldados. A veces los potenciómetros están sujetos a las carcasas plásticas por medio de una resina o cera rígida, solo hemos de aplicar calor a la misma para que se derrita, procurando no perjudicar el resto del servo.
Tras desoldar el potenciómetro de los calbecillos de menor sección Bl, Rj, Ng, y los cablecillos Bl y Ng de sus puntos de soldadura de la placa, extrema atención al desoldar o dar calor a la placa, lo recomendable al ser elementos de superficie de baja resistencia al calor será usar un soldador de 10 W y punta extra fina, ayudándonos de trencilla de desoldar.
Teniendo los puntos de soldadura limpios correspondientes a los cablecillos blanco y negro, se insertan a tope las resistencias de 2k2, procediendo a soldar en los puntos de soldadura y cortando el extremo sobrante. Los extremos contrarios se unen entre si y con el extremos libre del cablecillo rojo, soldando en un único punto. Obteniendo como pretendíamos un divisor de tensión exactamente por la mitad del valor total.

Para evitar espurios electromagnéticos forraremos la soldadura realizada con funda termoretractil.
Volvemos a montar cada cosa en sus sitio

Colocamos el cabezal y la tapa base, antes de atornillar comprobamos que el servo funciona una vez conectado al Rx y obedece a los mandos del Tx.
Hecho esto solo resta atornillar y poner a trabajar el servo como servo de escotas, para ello habrá que tornear la polea que recoja la escota, en este caso será de casi 70 centímetros. También hay que diseñar un elemento tensor que no deje que le cabo suelto se enrolle en si mismo imposibilitando el funcionamiento correcto del sistema desarrollado.
Una de las medidas de seguridad al comienzo de este, fue el tomar medida del consumo del amperaje del servo en vacío, sin cabestrante. Bien realicemos la comprobación, como podemos ver en el video el consumo es mínimo como antes de la intervención.
Con solo este servo para la escota y uno mas simple para el timón ya podremos hacer navegar a la barca al modo que los tradicionales llaman al Orsa Curta, a la Orza corta (que detallaremos en otro Post); no teniendo necesidad de accionar los elementos de D'avant y de Orza; quedando estos para un segundo escalón técnico.
Pit i Amunt.
tras efectuar la búsqueda de servos para escotas o velas, hemos encontrado varias soluciones. De entre todas nos despertó la curiosidad la convertir un servo de giro limitado a 60 o 180 º, en otro que gire en uno u otro sentido indefinidamente, a capricho del patrón.
Un servo básicamente es un motor que en su eje presenta un piñón solidario a una serie de engranajes, gobernado eléctricamente por una placa electrónica, a la que llegan tres cables del receptor, estos son rojo/negro alimentación de las baterías, el tercero de color blanco o amarillo u otro distinto a los anteriores según el fabricante que es la señal de gobierno, esta señal es interpretada por la placa y hace que el motor gire en uno u otro sentido de giro. Obviamente están en paralelo todos los servos y el receptor; en algún caso el receptor tiene alimentación independiente, por motivos de seguridad de sobre tensiones.
El giro del piñón puede ser según modelos de 60º, 180º o de varias vueltas (360º) en uno u otro sentido, para realizar la limitación de los primeros el piñón que sobresale de la carcasa que es el último de la serie de engranajes descritos, porta en su base un tetón o tope que incide en un resalte interior de la carcasa y lo para. Al mismo tiempo en la parte interna de este piñón hay un hueco a modo de aleta donde se aloja un elemento que ira solidario a este engranaje y al mismo tiempo transmite el giro al eje de mando de un potenciómetro lineal de unos 5 k ohmios.
Sin entrar en doctas disquisiciones electrónicas, comentaremos que un potenciómetro lineal de tres contactos es simplemente un divisor de tensión, llamamos ABC a los tres contactos, siendo A y C los extremos de una resistencia y B un contacto flotante a lo largo de este resistor. Entre AC tendremos una caída de tensión o diferencia de potencial de Vac fija, entre cada uno de los extremos y el contacto central B, habrá por tanto una Vab y una Vbc de tal manera que la suma de estas dos sea la total, mas gráficamente Vab + Vbc = Vac
La forma de reflejar esto de manera física, es que Vab tendrá valor 0 voltios cuando el potenciómetro este girado totalmente hacia el contacto A. Conforme giramos el potenciómetro hacia el contacto C, la tensión Vab irá creciendo hasta adquirir la tensión total o Vac.
Estos distintos valores de tensión en el contacto B hacen que el circuito integrado anexo "conozca" en que punto del giro se encuentra el servo. 0 voltios girado totalmente a un extremo, con Vac/2 (la mitad del valor de la tensión total) se encuentra en el punto central del recorrido, y con el valor Vac (tensión máxima que puede adquirir) el servo se encuentra girado al extremo contrario del de partida. Si algo no ha quedado muy claro, no dudar en preguntar y ampliamos el concepto.
Tras la teoría pasemos a la práctica, pues siempre ha sido mas fácil tocar que imaginar, si sabemos donde. Se trata de sustituir un potenciómetro de resistencia variable por dos resistencias fijas que nos mantengan siempre fijo el valor de tensión en el punto B. Como el potenciómetro presenta un valor de 5000 Ohm (5k) al dividir por dos tendremos un valor de dos resistencias de 2500 ohm, como industrialmente se fabrican con valores de 2k2 o 2k7, elegimos las menores las de 2200 ohm, cuyo código de colores es rojo, rojo, rojo, oro/plata de 1/4 watio.
Los elementos a usar han sido un Transmisor (Tx) y un Receptor (Rx) Futaba, el primero de 4 canales y el segundo de 6; que aunque no es importante para el desarrollo expuesto, queda comentado sin mas. Y el servo Himodel S4115M, características de este último en http://www.himodel.com/radios/15Kg-cm_T ... 4115M.html , cortesía de Denetor ( www.acercamadera.com ), que me ha prestado el equipo mientras adquiero uno.
Como medida preventiva intercalaremos en serie un amperímetro entre la fuente de alimentación y el tandem formado por el receptor y el servo. Midiendo el consumo de corriente cuando accionamos el mando del Tx, estando el servo sin carga alguna, el engranaje libre. Así podremos comprobar que tras la manipulación todo seguirá igual en cuanto a los consumos por defectos de montaje, roces o cualquier otro error mecánico.
Al mismo tiempo desconectaremos y descohesionaremos los elementos entre si y eléctricamente para evitar dañar las partes electrónicas.
Abrimos el servo accionado en los cuatro tornillos pasantes del fondo del chasis.
[/img]
El chasis se despieza en tres elementos, tapa base, cuerpo central y cabezal. En el cuerpo se encuentra el motor, el potenciómetro y la circuitería electrónica, en el cabezal se encuentra el conjunto de engranajes.
Vista de la electrónica y los tres puntos de soldadura del potenciómetro, mas concretamente
Se han resaltado con tres círculos en blanco, rojo y negro, por que así eran los colores de tres secciones diminutas de cablecillos que unían los puntos de soldadura con los tres contactos del potenciómetro. No confundir con los colores Blanco, Rojo y Negro de los cables que se ven en la parte superior que son la alimentación y el cable de señal como ya habíamos señalado anteriormente y no son equipotenciales los cables que llevan el mismo color, excepto el negro que hace de masa 0 voltios en todo el conjunto eléctrico de gobierno del barco, en este caso.
Fotografiamos o anotamos la posición de e cada uno de los engranajes para no llevarnos sorpresas posteriormente, y procedemos a sacar los engranajes de su ubicación.
Del engranaje último, el que se conecta al brazo exterior, cortamos el tetón que porta en la parte interna superior, en la imagen se señala la posición donde se encontraba antes de cortar.
Listo para montar de nuevo.
Comprobemos que el engranaje exterior acciona el giro de todo el conjunto de manera suave y correctamente.
Despiece del conjunto del potenciómetro, a la izquierda el engranaje, la pieza de plástico que transmite el giro, un rodamiento y el potenciómetro; se ven perfectamente los tres contactos desoldados. A veces los potenciómetros están sujetos a las carcasas plásticas por medio de una resina o cera rígida, solo hemos de aplicar calor a la misma para que se derrita, procurando no perjudicar el resto del servo.
Tras desoldar el potenciómetro de los calbecillos de menor sección Bl, Rj, Ng, y los cablecillos Bl y Ng de sus puntos de soldadura de la placa, extrema atención al desoldar o dar calor a la placa, lo recomendable al ser elementos de superficie de baja resistencia al calor será usar un soldador de 10 W y punta extra fina, ayudándonos de trencilla de desoldar.
Teniendo los puntos de soldadura limpios correspondientes a los cablecillos blanco y negro, se insertan a tope las resistencias de 2k2, procediendo a soldar en los puntos de soldadura y cortando el extremo sobrante. Los extremos contrarios se unen entre si y con el extremos libre del cablecillo rojo, soldando en un único punto. Obteniendo como pretendíamos un divisor de tensión exactamente por la mitad del valor total.
Para evitar espurios electromagnéticos forraremos la soldadura realizada con funda termoretractil.
Volvemos a montar cada cosa en sus sitio
Colocamos el cabezal y la tapa base, antes de atornillar comprobamos que el servo funciona una vez conectado al Rx y obedece a los mandos del Tx.
Hecho esto solo resta atornillar y poner a trabajar el servo como servo de escotas, para ello habrá que tornear la polea que recoja la escota, en este caso será de casi 70 centímetros. También hay que diseñar un elemento tensor que no deje que le cabo suelto se enrolle en si mismo imposibilitando el funcionamiento correcto del sistema desarrollado.
Una de las medidas de seguridad al comienzo de este, fue el tomar medida del consumo del amperaje del servo en vacío, sin cabestrante. Bien realicemos la comprobación, como podemos ver en el video el consumo es mínimo como antes de la intervención.
Con solo este servo para la escota y uno mas simple para el timón ya podremos hacer navegar a la barca al modo que los tradicionales llaman al Orsa Curta, a la Orza corta (que detallaremos en otro Post); no teniendo necesidad de accionar los elementos de D'avant y de Orza; quedando estos para un segundo escalón técnico.
Pit i Amunt.
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo
Re: RE: Conversión de servo
La Escota medirá entre 70/90 centimetros, la polea a razón de 2 Pi R, lo que salga.Lluis escribió:¡¡70 centímetros de polea!!,¿Y dónde la vas a poner?
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo


Robbe tiene un winchy de vela ( yo lo tengo pues se lo voy a poner a mi próximo RC de vela, el Colin Archer de Billings) y propone su uso según el esquema adjunto (tiene giro infinito para ambos lados y puede funcionar como un carrete).
Sin embargo Billings propone algo que me parece muy diferente y cuyo esquema también adjunto
Sin embargo Billings propone algo que me parece muy diferente y cuyo esquema también adjunto
- Adjuntos
-
-
En trabajo:Constitution (Model Shipways)+Druide chino+Wappen von Hamburg(Corel) + Confederacy(de Arsenal) + Schiffeto(planos)+ Victory(Caldercraft)+ Mary Rose(Jotika)
Hola LuisQ,LuisQ escribió:Robbe tiene un winchy de vela ( yo lo tengo pues se lo voy a poner a mi próximo RC de vela, el Colin Archer de Billings) y propone su uso según el esquema adjunto (tiene giro infinito para ambos lados y puede funcionar como un carrete).
Sin embargo Billings propone algo que me parece muy diferente y cuyo esquema también adjunto
Entiendo que la primera imagen es una solución ya aportada, y que es la que suelen llevar veleros de competición con velas marconi. Si bien es un lazo cerrado este solo porta arrastrando por nudo una escota
El segundo presenta según he creído entender dos o tres sistemas distintos, dos si el llamado SERVO solo acciona el timón.
Los SAIL WINCH 2 y 3 según el esquema es un sistema idéntico, es un lazo cerrado que gobierna un puño de vela y que la distancia entre los dos puntos de máximo desplazamiento siempre será algo menor que las salidas por cubierta de dicho lazo cerrado, y por ende el de la manga de la embarcación. ¿Para qué tipo de vela es, cangreja, estay, foques?
El SAIL WINCH 1, al parecer es mas como lo que busco, un carrete que gobierne una escota libre, que pueda largar cabo a una distancia de mas de media eslora, en mi caso alrededor de los ya mencionados 70 cm.
Creí que no habías mencionado el modelo y ya veo cual es en esta imagen

Contestando a lo que he preguntado los 2 y 3 gobiernan los foques, y el 1 la cangreja.
Las medidas he leído que son en centímetros incluyendo el bauprés de 47'5 de eslora por 12'5 de manga. Haciendo un calculo rápido del winch 1 largará una distancia máxima de 16 cm. Corrígeme si no estoy acertado en las apreciaciones.
En el caso de la barca de bou y a diferencia del modelo que nos presentas es que aún siendo casi el doble la barca Santa Tecla y doble y mitad mas la Virgen del Pilar; es de bajos planos, y el centro de la bodega esta ocupado por la caja de la Orza, la Carlinga del Palo y el macho del mismo.
En el caso de la barca Santa Tecla, además tiene el palo de Mitjana o Mesana, con su correspondiente pie y Carlinga.
Al principio parece que es una bodega que puede almacenarlo todo, sin embargo si ponemos el lastre, al final haré una pregunta al respecto. Las baterías de plomo de 6 voltios, similar a la del esquema segundo; poco espacio o muy engorroso ha de quedar para poner sistemas como el de Robbe, en un lazo con servo y polea de reenvío.
Como ejemplo estas imágenes tomadas en casa de José (ver visita a cal maño)


En la primera imagen son de tamaño grande 6V 12 Ah, y pequeñas en la segunda 6V 4'5 Ah
Es por esto que en mi caso particular, quiero hacer un desarrollo como el winch 1, de escota libre. Es por lo que incluso me estoy planteando el usar un paquete de 6 elementos de 7'2 V y 4000 mAh, con los propósitos de insertarlo por una de las escotillas practicadas en la cubierta de mi modelo, también podría insertar una de plomo pequeña, sin embargo me han recomendado que deben de ir en posición vertical, por los vasos internos y no es recomendable que vayan tumbadas. ¿Qué opinión tienes al respecto de tumbar este tipo de baterías? Y el segundo propósito es que apenas variaría el peso del lastre, por lo que podría dejar el lastre fijo en la bodega.
Sobre el lastre, he conseguido el suficiente en plomo, concretamente en piezas de las usadas en el contrapesado de neumáticos de automóviles. ¿Conoces donde podrían vender en otro formato, como barrotes, placas, sin tener que recurrir al soplete para poder manipularlo?
Gracias por participar.
Pit i Amunt.
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo
me he estado mirando las lecturas Jacc y es lo que quería comentarte ,nuestras barcas aun habiendo sitio tienen poca altura y si ademas llevamos las baterías eso complica mucho,por eso creo o por lo menos lo provare asi el sistema que en su dia enseño Joaquin,pero en vez de poner las poleas o el servo a lo horizontal,ponerlo a lo vertical,no se como ira,solo es cuestión de provar,aunque la virgen del pilar tiene una ventaja importante que es que toda la cubierta se desmonta.
saludos Guillermo
pit y amunt
saludos Guillermo
pit y amunt
tutto il giorno che lavora come un cavallo ed alla notte per mangiare come una gallina guasto
Pues te tengo que corregir. El modelo es grande. La eslora 125 cm, la manga 34 cm y la altura apoyado en el suelo llega a 136 cm. Tea djunto la hoja de instrucciones del modelo donde habla de estoJáCC escribió: Contestando a lo que he preguntado los 2 y 3 gobiernan los foques, y el 1 la cangreja.
Las medidas he leído que son en centímetros incluyendo el bauprés de 47'5 de eslora por 12'5 de manga. Haciendo un calculo rápido del winch 1 largará una distancia máxima de 16 cm. Corrígeme si no estoy acertado en las apreciaciones.
Y no te puedo ayudar gran cosa pues va a ser mi primer modelo de vela y aunque me lo he estudiado y comprado los materiales según mi crieterio todo es teórico.
Yo no pienso poner baterías de plomo aunque tengo sitio, prefiero NiMH y si me falta capacidad pues pongo en paralelo. De hecho voy a remodelar mi versión eléctrica del African Queen y le voy a cambiar el motor de 14 V que alimentaba con dos baterias NiMH de 7,2 por otro de 7,2 V y voy a poner las dos baterías en paralelo. Puedes poner dos baterías de 7,2 V y 4A en paraelo y sacar 8A de capacidad, casi como una grande de plomo. O poner 3 en paralelo.JáCC escribió: Es por esto que en mi caso particular, quiero hacer un desarrollo como el winch 1, de escota libre. Es por lo que incluso me estoy planteando el usar un paquete de 6 elementos de 7'2 V y 4000 mAh, con los propósitos de insertarlo por una de las escotillas practicadas en la cubierta de mi modelo, también podría insertar una de plomo pequeña, sin embargo me han recomendado que deben de ir en posición vertical, por los vasos internos y no es recomendable que vayan tumbadas. ¿Qué opinión tienes al respecto de tumbar este tipo de baterías? Y el segundo propósito es que apenas variaría el peso del lastre, por lo que podría dejar el lastre fijo en la bodega.
Yo no pongo plomo de lastre, pongo estaño que es menos contaminante y se lo compro a Graupner en botes de 2,3 Kg Y también sé que Krick lo vende en piezas autoadhesivas.JáCC escribió:
Sobre el lastre, he conseguido el suficiente en plomo, concretamente en piezas de las usadas en el contrapesado de neumáticos de automóviles. ¿Conoces donde podrían vender en otro formato, como barrotes, placas, sin tener que recurrir al soplete para poder manipularlo?
- Adjuntos
-
 Doc1.doc
Doc1.doc- (204 KiB) Descargado 75 veces
En trabajo:Constitution (Model Shipways)+Druide chino+Wappen von Hamburg(Corel) + Confederacy(de Arsenal) + Schiffeto(planos)+ Victory(Caldercraft)+ Mary Rose(Jotika)
Entonces estaba en pulgadas la Web de donde he sacado los datos, gracias por la hoja de datos.LuisQ escribió: Pues te tengo que corregir. El modelo es grande. La eslora 125 cm, la manga 34 cm y la altura apoyado en el suelo llega a 136 cm. Tea djunto la hoja de instrucciones del modelo donde habla de esto
Y no te puedo ayudar gran cosa pues va a ser mi primer modelo de vela y aunque me lo he estudiado y comprado los materiales según mi crieterio todo es teórico.
.../...
Puedes poner dos baterías de 7,2 V y 4A en paraelo y sacar 8A de capacidad, casi como una grande de plomo. O poner 3 en paralelo.
.../...
Yo no pongo plomo de lastre, pongo estaño que es menos contaminante y se lo compro a Graupner en botes de 2,3 Kg Y también sé que Krick lo vende en piezas autoadhesivas.
Un detalle que por obvio no se tiene en cuenta, es que estos modelos de barca tradicional no ha de llevar motor ni su aparejado regulador de velocidad, por lo que una batería de 7'2 V y 4000 mAh, sea del electrolito que sea, sería mas que suficiente para una larga travesía de varias horas. Creo que me inclinaré por esta opción en detrimento de las baterías de plomo.
He tardado en contestar por que he estado buscando el producto de estaño, en las Web de Graupner y Krick; y sin embargo no he sido capaz de encontrarlo, te agradecería los enlaces.
Pit i Amunt
No dejéis de visitar la Dársena http://www.ladarsenadejacc.es/
Un cordial saludo
Un cordial saludo