

Empiezo expresando que es lo que la IA puede contribuir en mi velero y el porqué. De forma muy genérica se puede decir que la IA es aquella ciencia que puede encontrar soluciones efectivas que usando técnicas de programación tradicional son o imposibles, o que requieren saber de antemano todos los factores que influencian un resultado. La IA aprende a base de tener acceso a una cantidad lo mas grande posible de datos. Así la IA identifica dependencias que pueden ser no evidentes para el ser humano.
Lo que yo veo es el ejemplo de hacer navegar un velero desde un punto inicial a un destino. Como bien saben aquellos que se dedican al arte de navegar un velero, hay muchos factores que impactan la eficiencia y la posibilidad de un velero recorrer de un punto de partida a uno como destino.
Es por lo tanto esencial, a mi opinión, identificar factores que puedo monitorear con sensores de abordo. Estos sensores crean los datos que la IA requiere para aprender en un primer paso, de ir aprendiendo continuamente mientras ejecuta la función deseada. Esto, a mi opinión requiere limitar los factores que iremos a monitorear y usar para el aprendizaje de la IA. Creo que con definir tal limitación de los factores es esencial para poder iniciar el proceso de desarrollar una IA como apoyo y semi-autonomía de mi velero.
Empecemos seleccionando los factores a incluir.
Un velero tiene un perfil de velocidad o mejor dicho empuje por las velas en dependencia de la dirección en la cual navega y de la dirección aparente del viento en sus velas. Empiezo por definir el término de dirección de viento aparente:
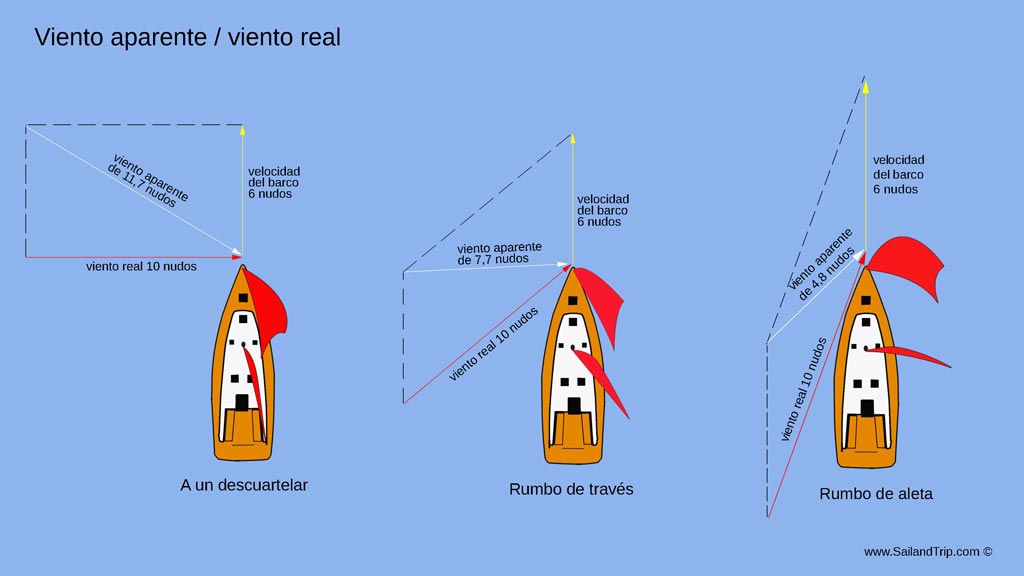
Aquí el enlace al artículo del cual he sacado la imagen y que explica la materia en Español.

Aquí el gráfico y las ecuaciones que se pueden adaptar a ser usadas para generar los datos partiendo de la información que los sensores en el velero nos proporcionan.

Perdonen, no me fue posible encontrar este diagrama en Español y tampoco es el gráfico mas apropiado a usar. El gráfico muestra la relación entre la velocidad alcanzable dependiendo de la dirección de navegación en relación a la dirección del viento. Lo interesante es que el máximo de velocidad se alcanza, no con el viento en popa, sino cuando entra de lado.
Estas informaciones las presento para nombrar los factores estrictamente relacionados entre la dirección en la cual el velero navega y la dirección real y aparente del viento.
Teniendo un sensor que nos indique la dirección aparente del viento en el velero y sabiendo como es la relación entre el viento y la dirección de navegación nos permite usar 2 tipos de sensores.
El uno es un sensor angular que monitoree la dirección de viento aparente y el otro es un sensor magnético que nos monitoree la dirección del casco del velero, un compass electrónico. Así pues la IA recibe datos de los sensores los cuales puede usar para su aprendizaje y para su operación.
El otro aspecto es el ángulo del palo de la vela en relación al eje central del casco del velero. Este sensor ya lo uso para controlar el largo de la escota y como consecuencia el control del motor de paso que opera como winche en mi velero.
Otro factor es la velocidad del viento.Esto es relevante pues tiene como consecuencia la inclinación del casco, su rotación alrededor del eje longitudinal del casco. Si el objetivo de la IA es lograr llegar al punto destino lo mas rápido posible, entonces el ángulo de inclinación del casco es el síntoma que tiene como una de sus causas la velocidad del viento.
Este factor, la inclinación del casco y de la vela, reducen el area de la vela sobre el cual el viento ejecuta su acción de mover el velero, cuando mas el casco se incline. Este efecto también es una donde no queremos que el velero se incline demasiado. Sensores para monitorear la inclinación del casco son aquellos que se usan en los controles, por ejemplo en celulares, para permitir al usuario operar en juegos.
Finalmente un sensor para registrar la velocidad del velero en relación al agua. Aquí existen diversas técnicas para monitorear esto. este factor es una de los objetivos de la IA de lograr un máximo de velocidad de navegación y que tiene la función de valorar si los otros factores aumentan o disminuyen esta velocidad. Así uno de los objetivos de la IA es lograr la mayor velocidad posible "jugando con los otros factores.
Esto juega un decisivo papel para definir el curso que el velero debe seguir para moverse del punto de partida al punto destino.
Como pueden ver, hay un cierto número de factores que influencian el objetivo de llegar de la forma mas rápida del punto A al punto B. Si trato de lograr esto escribiendo código de programación que ponga estos factores en relación para logar el objetivo, la cosa es casi imposible de lograr.
La IA aquí trabaja de forma diferente. Si ponemos los valores monitoreados en una tabla, entonces el factor que indica si una opción es beneficiosa para el objetivo, un tiempo mínimo para llegar del punto A al punto B, es buena o mala. A razón del aprendizaje de la IA esta va aprendiendo a "saber" como "jugar con los factores monitoreados para lograr el mejor resultado.
Así logro tener la infraestructura requerida para el aprendizaje y la operación de la IA en controlar el velero de forma óptima para el objetivo deseado. Como los sensores generan datos de su monitoreo a gran velocidad, esto significa que la IA tiene la gran cantidad de datos requeridos para su aprendizaje.
A la vez estos sensores en su mayoría ya los tengo previstos para mi velero dentro del sistema de control de escotas que he presentado como parte de mi reporte sobre la construcción del velero Carina que estoy pasando a este foro.
