josechu
Referente
Hola a todos.
Estimados amigos, informaros que llevo varios días trabajando en el desarrollo de un variador de velocidad, electrónico y reversible para la posible instalación en cualquier barco radiocontrolado.
Las características técnicas y según el Data Shell de los componentes utilizados, son las siguientes:
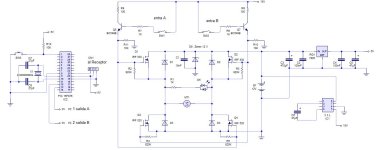
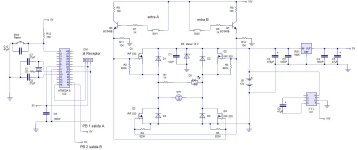
Funciona a través de los PCM captados del receptor y de los PWM generados respectivamente por el microcontrolador PIC 16f876, que controla un puente en H,
formado por un conjunto de cuatro transistores Mosfet asimétricos en canal N, protegidos contra la corriente inversa producida por el motor, por sus respectivos diodos.
Tensión a 12 voltios, Capaz de soportar hasta una carga de 60 Amperios. (dependiendo de los transistores a utilizar).
Por favor, para los más interesados no me preguntéis por el duti cycle, ni por la frecuencia en Hz, ya que eso es parte del Software y aún está por determinar.
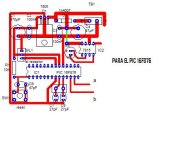
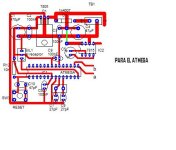
Dicho proyecto, ya ha pasado con éxito la fase de pruebas, correspondiente a la simulación en circuito, el siguiente paso, es la realización de la placa PCB, donde se instalaran los componentes que se muestran en el esquema, y en la que actualmente me encuentro.
A este respecto, me gustaría si fuese posible que si alguien quiere hacer algún comentario, que sea CONSTRUCTIVO, o bien que pudiese servir para mejorar el proyecto, que lo exponga si así lo desea.
ya que este puede ser el mejor momento, y no criticarlo inútilmente después de haberlo realizado.
Estimados amigos, informaros que llevo varios días trabajando en el desarrollo de un variador de velocidad, electrónico y reversible para la posible instalación en cualquier barco radiocontrolado.
Las características técnicas y según el Data Shell de los componentes utilizados, son las siguientes:
Funciona a través de los PCM captados del receptor y de los PWM generados respectivamente por el microcontrolador PIC 16f876, que controla un puente en H,
formado por un conjunto de cuatro transistores Mosfet asimétricos en canal N, protegidos contra la corriente inversa producida por el motor, por sus respectivos diodos.
Tensión a 12 voltios, Capaz de soportar hasta una carga de 60 Amperios. (dependiendo de los transistores a utilizar).
Por favor, para los más interesados no me preguntéis por el duti cycle, ni por la frecuencia en Hz, ya que eso es parte del Software y aún está por determinar.
Dicho proyecto, ya ha pasado con éxito la fase de pruebas, correspondiente a la simulación en circuito, el siguiente paso, es la realización de la placa PCB, donde se instalaran los componentes que se muestran en el esquema, y en la que actualmente me encuentro.
A este respecto, me gustaría si fuese posible que si alguien quiere hacer algún comentario, que sea CONSTRUCTIVO, o bien que pudiese servir para mejorar el proyecto, que lo exponga si así lo desea.
ya que este puede ser el mejor momento, y no criticarlo inútilmente después de haberlo realizado.