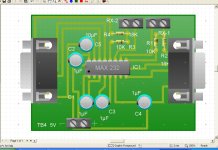
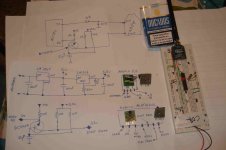
Siguiendo un orden empezaremos hablando sobre la F.A el esquema eléctrico lo podréis
encontrar en este mismo hilo (fuente alimentación 5v-3.3v), en cuanto a la pcb , como se
puede observar está montada sobre placa perforada(no veo que sea nada relevante).
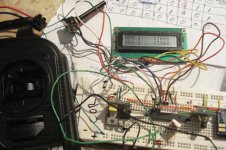
Elegí esta F.A con dos salidas diferentes ya que la alimentación del micro es 5v y el modulo
(xbee)funciona con 3.3 v.
encontrar en este mismo hilo (fuente alimentación 5v-3.3v), en cuanto a la pcb , como se
puede observar está montada sobre placa perforada(no veo que sea nada relevante).
Elegí esta F.A con dos salidas diferentes ya que la alimentación del micro es 5v y el modulo
(xbee)funciona con 3.3 v.