La mejor forma de aprender es jugando
Hola aquí pondré diversos circuitos que iré realizando, con una explicación de la lógica espero que os guste y si alguno lo puede aplicar a sus proyectos pues mejor.
Bueno empecemos este circuito es solo una SIMULACION, para hacerlo real habría que poner unos cuantos elementos mas .
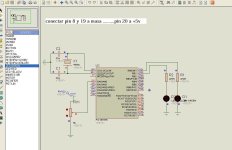
Consta de un potenciómetro un pic y un motor (ver foto).
Que hace el circuito ?.... pues muy fácil dependiendo en la posición que pongamos el potenciómetro girara en un sentido u otro (en el centro del pot. No funcionada el motor).
Como lo hace ?.... muy fácil también programándolo.
Empecemos, utilizare el conversor a/d del micro, hare la conversión con 8 bits con lo cual tendremos 255 posiciones distintas. Pues teniendo ese dato lo demás es muy simple, le diremos al micro que ponga a 1 el pin rb0 y a cero el pin rb1, con lo cual el motor girara en un sentido, cuando el potenciómetro llegue a la mitad de su recorrido que ponga tanto el pin rbo y rb1 a cero, por lo cual el motor se detendrá y si seguimos girando el potenciómetro que invierta los valores de rb0 y rb1, y obtendremos el giro en sentido contrario.
PD tambien subo una carpeta con: simulacion en proteus con el hex para que lo podais simular vosotros,el asm del mismo y npl. para que veais como lo programe con niple.
Intento subir el video y hay problemas, haber si mas tarde lo puedo subir.
saludos
Hola aquí pondré diversos circuitos que iré realizando, con una explicación de la lógica espero que os guste y si alguno lo puede aplicar a sus proyectos pues mejor.
Bueno empecemos este circuito es solo una SIMULACION, para hacerlo real habría que poner unos cuantos elementos mas .
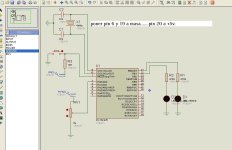
Consta de un potenciómetro un pic y un motor (ver foto).
Que hace el circuito ?.... pues muy fácil dependiendo en la posición que pongamos el potenciómetro girara en un sentido u otro (en el centro del pot. No funcionada el motor).
Como lo hace ?.... muy fácil también programándolo.
Empecemos, utilizare el conversor a/d del micro, hare la conversión con 8 bits con lo cual tendremos 255 posiciones distintas. Pues teniendo ese dato lo demás es muy simple, le diremos al micro que ponga a 1 el pin rb0 y a cero el pin rb1, con lo cual el motor girara en un sentido, cuando el potenciómetro llegue a la mitad de su recorrido que ponga tanto el pin rbo y rb1 a cero, por lo cual el motor se detendrá y si seguimos girando el potenciómetro que invierta los valores de rb0 y rb1, y obtendremos el giro en sentido contrario.
PD tambien subo una carpeta con: simulacion en proteus con el hex para que lo podais simular vosotros,el asm del mismo y npl. para que veais como lo programe con niple.
Intento subir el video y hay problemas, haber si mas tarde lo puedo subir.
saludos