LuísQ:
Contestaré a tus preguntas también por partes:
Columnas:
Como veo que la forma de las columnas es más una cuestión de estética, y en este caso eres el Armador, puedes hacer un croquis con las formas que más te gusten y intento reproducirlas.
Accionamiento del cambio Hackworth:
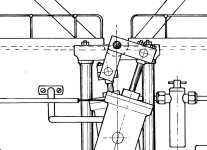
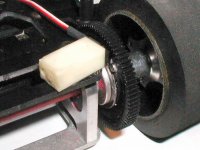
La disposición que he pensado y adoptado en este caso, es la que muestran las fotos, aunque la varilla de mando puede accionarse desde los servos colocados en la parte de popa detrás del motor. El ataque a la varilla de mando del motor por debajo y en el extremo opuesto al pomo estriado de la varilla obedece a lo siguiente:
En un servo normal, el desplazamiento lineal que se puede obtener en el extremo del brazo con un giro de +- 45º, es de aprox. 2 cm..
En el TVR, el desplazamiento necesario de la varilla a la altura del pomo, para llegar a las posiciones extremas (que aprox. fijan las ranuras de la barrita central ) es de 4,5 cm aprox. Para no tener que cambiar el brazo del servo o alargarlo con inventos que ademá ocupará más espacio, lo mas efectivo es colocar el Qwick-link más cerca del centro de giro del dado, a un radio adecuado, que se ajustará con facilidad deslizando la varilla i fijando el prisionero central del dado.
La barrita central ranurada de posición de la varilla del cambio, aunque se gire 90º, queda desplazada del centro y por lo tanto ofrece un rozamiento excesivo que dificultaría el movimiento y precisión del servo . Este artilugio estará pensado para modelos estacionarios, accionado a mano y no para RC. Por eso como es un estorbo hay que retirarlo.
Las posiciones extremas corresponden al arranque en uno u otro sentido, y es en estos puntos ( si la distribución está bien proyectada i ajustada), donde la válvula de distribución abre las lumbreras en los puntos muertos en su momento , y permanece abierta durante casi toda la carrera de admisión, facilitando el arranque del motor. Pero por otra parte es la posición en que hay más consumo de vapor.
Sobre la regulación, y contestando a Joaquin , hay que tener en cuenta lo siguiente:
En la marina con grandes máquinas y por razones de rendimiento, tamaño de calderas y de economía en el consumo de combustible, es ,(mejor, era) obligado el uso del control de expansión del vapor, para poder aprovechar las propiedades expansivas del mismo, lo que se obtiene variando la carrera de la válvula y desplazando los momentos de apertura y cierre.
Al mover el mando sobre la barra del cambio, la valvula sólo permanece abierta una parte de la carrera de admisión, siendo el pistón empujado por el vapor en expansión con el ahorro consiguiente.
En los modelos, ésto tiene ninguna o poca importancia, pero sí que influye en el control de velocidad, que rebasados unos puntos, decrece al llevar hacia el centro la barra. Esto nos sirve para además de la inversión de giro, ajustar o trimar la velocidad de los dos motores para conseguir una trayectoria recte sin recurrir al timón.
Por eso creo que lo más sencillo y efectivo, es un servo para cada cambio , y una válvula de paso común a los dos motores, Todos ellos a mando lineal proporcional o stics en el transmisor,
También se pdrían montar una derivación en "T"( si se disponen de canales proporcionales suficientes) y válvulas de control para cada motor, pero esto complicaría demasiado el pilotaje (Creo, pero para eso están los retos)
La foto 4987 correspondería al motor de babor con los cilindros apuntando a proa. La admisión de vapor, después de la váula de paso y lubricador, sería por la parte inferior y por el centro de una "T" con racores en les extremos que uniran los tubos correspondientes da cada motor. La evacuación de igual disposición, sería por la parte inferior.
Separador de aceite:
El uso de separador es opcional y lo dejo a tu elección. Por espacio creo que se dispone más que suficiente para todo, es cuestión de organizarlo a la vista de los componentes ya preparados , es como yo lo haría.
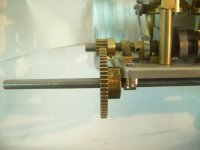
El eje de la salida de la reductora que he montado es provisional ( barra de acero plata calibrada de 5 mm de diámetro), Éste puede ser enterizo con el de las paletas sin necesidad de acoplamientos, en cuyo caso para el montaje será necesario hacerlo desde el exterior de casco atravesando, por este orden: Cojinete de apoyo exterior- Buje de la paleta-cojinete interior sobre o proximo a la borda- Rueda dentada- casquillo, cojinetes en le base del motor y los anillos de fijación correspondientes.
Respecto a las medidas que pides, espera a que reciba el 2º motor y haga el montaje correspondiente, procurando acortar las medidas de anchura al máximo. La altura vendrá determinada por la longitud de las columnas, teniendo en cuenta que la distancia vertical desde el centro del eje de la reductora al borde inferior de la base de alumio del TVR es de 37,5 mm.
Si hay algún punto poco claro me lo dices y hago un croquis. Como no domino esto del dibujo por ordenador, hago una foto al dibujo y lo pongo.
Y hasta aquí puedo decir, ,, por ahora... Menudo rollete, espero no se me borre por tercera ven al intentar editarlo,,,,
Salut,
Xavier