LuisQ
Leyenda
El modelo en su versión de motorización eléctrica no acaba de gustarme. En realidad fué mi primer modelo RC y desconocía muchas cosasa. Ahora con más experiencia en RC he decidido hacer algunos cambios.
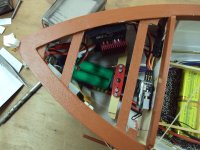
Lo primero es quitar el variador mecánico, que es poco fino y tiene un gran consumo. Además ocupa mucho espacio. También voy a quitar la batería del receptor y alimentarlo por BEC desde el variador. Otro cambio importante es la tensión de alimentación del motor de 14,4 v que consigo con dos baterías de 7,2 v en serie. A la vez alimento a un motoreductor auxiliar cuya alimentación máxima es de 7,2 V y que estoy alimentando con las baterías del receptor. Al eliminar esta batería me quedo sin alimentación. Esto era un fallo del dieseño anterior pues en cuanto encendía el receptor el motor-reductor auxiliar se ponía a funcionar.
La función de este motor auxiliar es mover el motor de vapor simulado de forma que parezca que mueve la hélice. Era poco realista por tanto que se moviera sin mover el motor eléctrico.
La idea es por tanto poner las dos baterías de 7,2 V en paralelo con lo que tengo que cambiar el motor principal. Le voy a poner un Graupner Speed 600 eco de 7,2 v. Este motor lo voy a mover con un variador Graupner Speed Profi 23R, de 7.2 a 8.4V y de 23/120A, que va a alimentar a un mini-receptor R600 de Graupner de 6 canales. El motoreductor que mueve el motor de vapor simulado lo voy a mover con el mini-variador de Graupner PICO8, de 6 a 9.6V y de 8/16A, que solo tiene giro adelante.Y es que el motoreductor no me conviene que gire en ambas direcciones pues el motor de vapor simulado solo debe girar en un sentido. Al llevar dos variadores necesito un mínimo de tres canales lo que justifica el uso del variador indicado y al que he puesto el mismo cristal que al del submarino. Así voy a usar el mismo emisor para ambos modelos, el X-412 de Graupner de 6 canales.
Mañana pondré fotos del modelo con las partes que he retirado ya faltantes y con los nuevos materiales que ya me han llegado.
Lo primero es quitar el variador mecánico, que es poco fino y tiene un gran consumo. Además ocupa mucho espacio. También voy a quitar la batería del receptor y alimentarlo por BEC desde el variador. Otro cambio importante es la tensión de alimentación del motor de 14,4 v que consigo con dos baterías de 7,2 v en serie. A la vez alimento a un motoreductor auxiliar cuya alimentación máxima es de 7,2 V y que estoy alimentando con las baterías del receptor. Al eliminar esta batería me quedo sin alimentación. Esto era un fallo del dieseño anterior pues en cuanto encendía el receptor el motor-reductor auxiliar se ponía a funcionar.
La función de este motor auxiliar es mover el motor de vapor simulado de forma que parezca que mueve la hélice. Era poco realista por tanto que se moviera sin mover el motor eléctrico.
La idea es por tanto poner las dos baterías de 7,2 V en paralelo con lo que tengo que cambiar el motor principal. Le voy a poner un Graupner Speed 600 eco de 7,2 v. Este motor lo voy a mover con un variador Graupner Speed Profi 23R, de 7.2 a 8.4V y de 23/120A, que va a alimentar a un mini-receptor R600 de Graupner de 6 canales. El motoreductor que mueve el motor de vapor simulado lo voy a mover con el mini-variador de Graupner PICO8, de 6 a 9.6V y de 8/16A, que solo tiene giro adelante.Y es que el motoreductor no me conviene que gire en ambas direcciones pues el motor de vapor simulado solo debe girar en un sentido. Al llevar dos variadores necesito un mínimo de tres canales lo que justifica el uso del variador indicado y al que he puesto el mismo cristal que al del submarino. Así voy a usar el mismo emisor para ambos modelos, el X-412 de Graupner de 6 canales.
Mañana pondré fotos del modelo con las partes que he retirado ya faltantes y con los nuevos materiales que ya me han llegado.