Motores de paso tienen habilidades muy especiales que los hacen muy atractivos para el modelismo naval. Por otro lado hasta personas que los usan dentro de sus actividades laborales con frecuencia no tienen un entendimiento completo de lo que son estos motores y que factores técnicos influyen en su uso. El ejemplo lo quiero dar de un forista de modelismo naval en Inglaterra. este me respondió que los usa y tiene que ver mucho con este tipo en su profesión, pero que una de las cualidades de este tipo de motor es que se calientan mucho, ya más que una vez se había quemado por tocarlos accidentalmente.
Una de las posibles explicaciones de esto son probablemente las limitaciones de las funciones de placas para su control. Entendiendo en detalle la función de estos motores y usando parámetros de control disponibles en componentes y placas de control en todo el mundo de una empresa llamada Trinamic, permite experimentar y entender en detalle este tipo de motores. Me he decidido desarrollar este tutorial aquí en nuestro foro en Español, también public0 y desarrollo este tutorial en Lengua Inglesa y Alemán, como reconocimiento al trato justo y respetuoso que he recibido en este foro y como expresión de mi orgullo de sentirme y ser latinoamericano de nacimiento en Guayaquil, Ecuador y de padres alemanes. Eso sí, el tutorial es de nivel avanzado, pero vuelvo a referirme como ejemplo a las respuestas del foro en Inglaterra. Allí un forista expresó que entre otra la falta de conocimiento de los términos usados le era prácticamente imposible seguir el tutorial. Esta respuesta fue de gran ayuda para mi y explique el significado de los términos tal cual aparecían las preguntas. Por eso, no duden en preguntar, pues es de poco valor si todo aquel con voluntad e interés de seguir el tutorial, no lo puede por no entender los términos usados y comunicar el significado de estos términos es parte del objetivo de este tutorial. También tengo 2 motivos egoístas! El uno es que escribiendo el tutorial y respondiendo a las preguntas me obliga a profundizar mis estudios para tratar de encontrar una forma sencilla y clara de explicar. El segundo motivo está relacionado al primo de un buen amigo Español que reside aquí en Alemania al norte de Baviera. Este hombre a expresado su interés de dedicarse al estudio y el desarrollo de programas que van a ser de gran ayuda para mí y este amigo en nuestros modelos. Este tutorial es el camino que uso para comunicarle a el los conocimientos y con los videos demostrar cómo esto le permite una actividad donde va a ver los resultados de lo que hace. Pero también voy a tratar de comunicar de forma muy genérica para mí, la gran imagen del mensaje del tutorial, lo que tiene como objetivo comunicar conceptos generales sobre este tipo de motores y aquellos que no quieren mas que esto para considerar el uso de este tipo de motores en nuestra afición, pero siendo una fuente de conocimientos detallados, si el interés aparece sobre alguna pregunta en detalle. Por eso, pregunten, que el que no pregunta o es un especialista en estas cosas y por decencia no quiere que errores que probablemente haga sean visibles a razón de su pregunta o corrección se vuelvan públicos, o quizá no quiera meterse más en el tema o simplemente no le interesa! Una posición absolutamente válida.
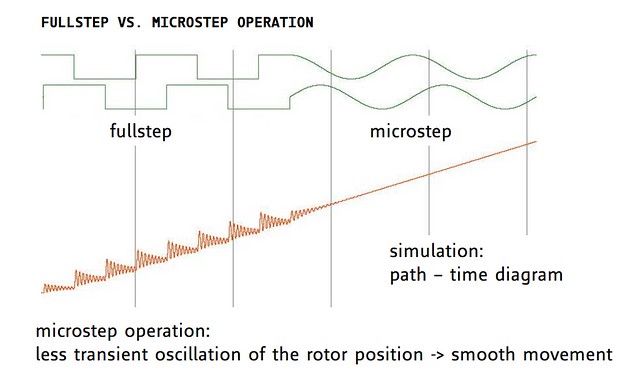
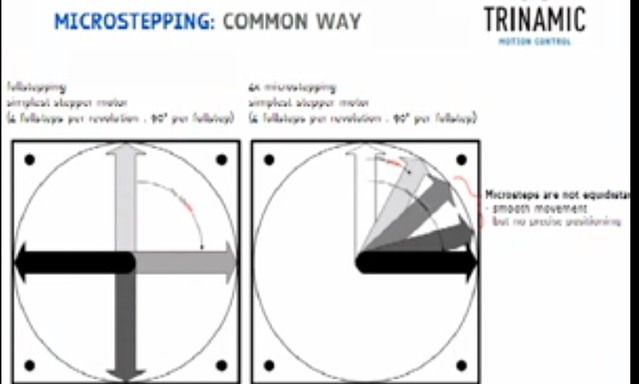
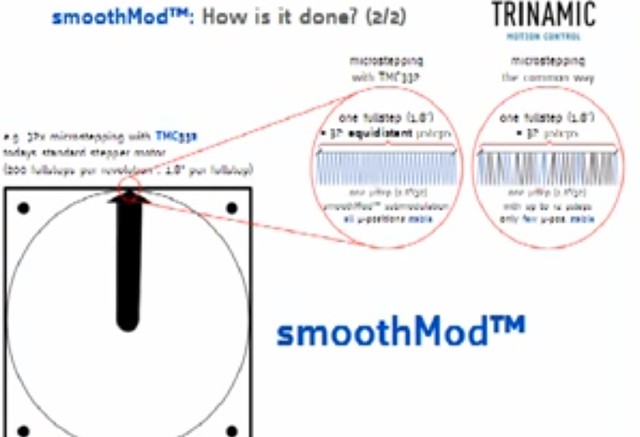
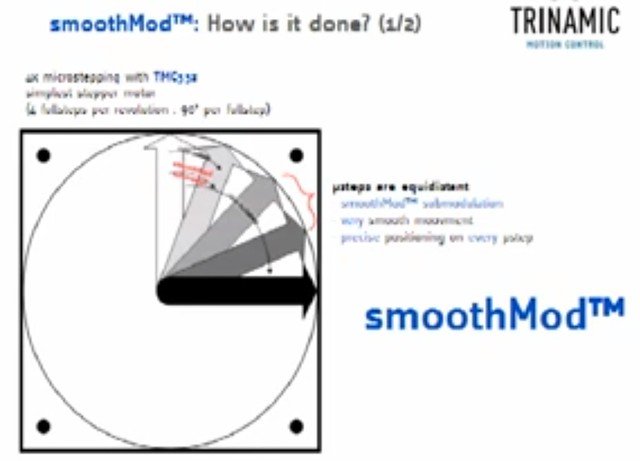
Empecemos pues con el tutorial. Un motor de paso como lo indica el nombre da pasos y no como un motor de escobillas o sin escobillas tiene como objetivo girar ofreciendo un cierto torque. En cada paso el eje del motor de paso gira por un cierto ángulo que se puede expresar como fracción del giro completo de 360°. Muchos motores de paso hacen 200 pasos completos para un giro de 360° o expresado de otra forma, giran por 1,8° por cada paso completo. Quizá se pregunten porqué no escribo solo de pasos, pero de pasos completos. la razón es que en el control de los motores de paso también se hacen "micropasos". Micropasos son pasitos que se hacen y donde un cierto número de estos micropasos resulta en en un paso completo. El micropaso por lo tanto es una fracción del paso completo y como es frecuentemente en la electrónica digital el número es una que resulta de cambiar el valor del exponente a la base "2".
2E0, o cero veces 2 = 1
2E1, o 2 = 2
2E2, o 2 * 2 = 4
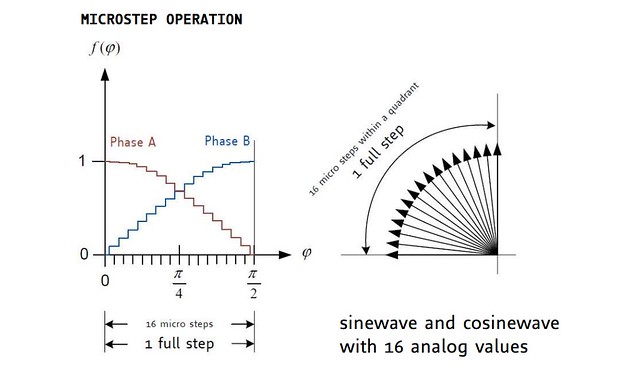
y así continuamente un factor "2 mas resulta en valor doble al anterior hasta 2E8 = 256, lo que pueden verificar ustedes mismos. Como esto define cuantos micropasos hacemos para avanzar un paso completo esto se llama la resolución de los micropaso y es uno de los parámetros que se pueden definir para controlar un motor de paso!
Si no se dejan asustar de la materia, cada detalle, cada término que voy explicando es simple. Algo que realmente es aplicable a mucho de la electrónica digital. es el uso del lenguaje técnico, de los términos, que le ayuda al ingeniero justificar el salario alto que pide por sus servicios! Chiste aparte!
De esta forma de funcionar los motores de paso resulta una característica. es posible conocer la posición exacta actual de un motor de paso y es posible indicarle ir a una posición diferente nombrando el número de pasos entre su posición actual y la nueva deseada. Siendo así evidentemente un motor de paso no esta pensado para mover el hélice de un barco, para ello motores de escobillas o sin escobillas son mucho mas adecuados! Tampoco el usarlo para hacer girar lentamente la antena de un radar en uno de nuestros modelos es el objetivo, pero se encuentra dentro del margen de usos imaginables. Yo tengo pensado usar motores de paso para hacer girar el timón de mi velero, el Carina, que presento aquí en el foro en la sección dedicada a veleros y a proyectos de pasos paso de descripción! la razón es otra de las cualidades del motor de paso, es que es posible operarlos sin que hagan ruido perceptible a diferencia de un servo, donde todos conocemos el ruido que hace! Pero también tengo pensado su uso para mover la rueda de timón de forma análoga al giro del timón. Otro uso es el de hacer girar el compass, usando los datos de una componente de compass electrónica para determinar su orientación. Aquí cada dirección que el velero tome corresponderá a una posición del motor de paso dentro de los 360° de un giro completo! El gran uso pero será el usar el mismo motor que ven en los videos para realizar el winche que controla la cuerda que controla la posición del palo de la vela mayor por ejemplo! pero a eso entraré en mayor detalle en mi descripción de la construcción del velero Carina y de forma que considere oportuna en el contexto de este tutorial, pues siempre quiero mostrar la relevancia en relación a nuestra afición!
Habiendo escrito tanto permítanme presentarles algunas imagenes para ilustrar lo que es un motor de paso y como funciona!
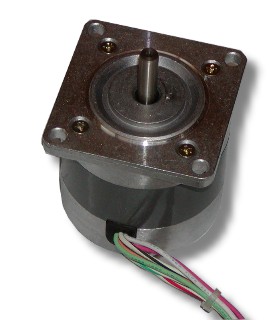
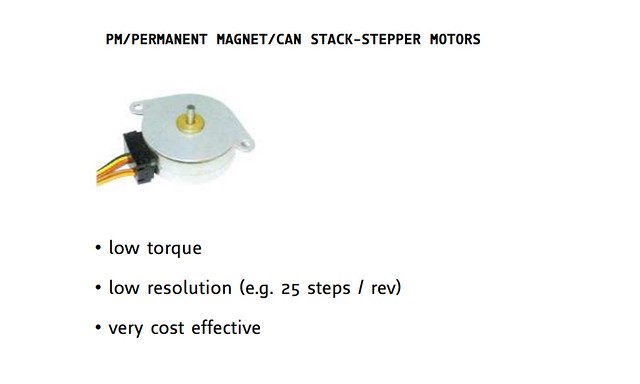
Empiezo con la imagen de un motor de paso. Lo especial que tiene es que de el salen muchos cables, cuando de los otros tipos de motores tenemos 2, uno para tierra y el otro para el polo positivo e invirtiendo se logra invertir la dirección de giro. Antes se usaba en lo general motores "unipolares" pues el general los controles era mucho mas sencillo y por eso aún hoy encontramos muchos motores unipolares cuando canibalizamos viejas impresoras, los mecanismos para floppies, CDs y DVDs. Aquí nos vamos únicamente dedicar a motors bipolares y ya explicare que los caracteriza. Estos motores, gracias a las componentes de control modernas facilita su uso, siendo Trinamic probablemente el proveedor mas sofisticado en sus productos!
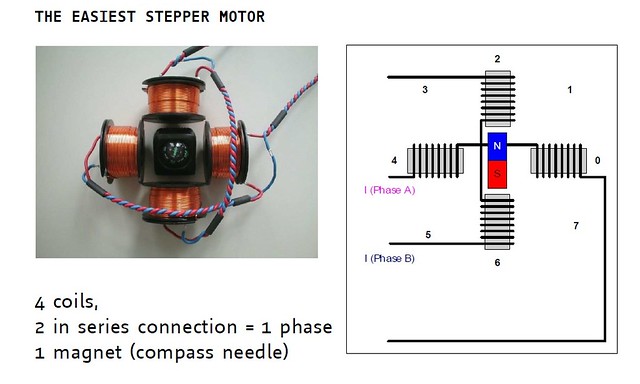
Esta imagen muestra un motor de paso altamente simplificado facilitando así presentar lo que es un motor de paso. La imagen a la izquierda muestra 4 bobinas y en el centro, donde iría el eje del motor un compás y es visible la aguja del compás que consiste de un magneto con su polo norte, en color azul en el esquema a la derecha y el polo sur en color rojo. Pasemos a ver en detalle el esquema a la derecha. Podemos ver que existen 2 circuitos llamadas "Phase A" y "Phase B". Cada uno consiste de un cable que forma el cableado de la bobina y cada circuito contiene 2 bobinas! De allí resulta que este motor tendría 4 cables saliendo de el! Verdad que es evidente y nada dificil! usemos este conocimiento para sacarle un provecho práctico que es de especial utilidad cuando el motor de paso que queremos usar lo sacamos de una impresora vieja y no tenemos hoja de datos! Si usamos un multimetro y medimos la resistencia entre 2 de los cables que salen del motor, entonces o el instrumento nos indicará una resistencia infinita cuando los cables corresponden a 2 de los circuitos, donde no hoy conexión entre ellos y una resistencia muy pequeña cuando los cables corresponden ambos o a la "Phase A" o a la "Phase B". Verdad que es sencillo identificarlos! Bueno, también hay motores de paso de los cuales salen 8 cables. Pues me imagino que ya son capaces de contestar por si mismos! En vez de tener las 2 bobinas de un circuito conectadas en "serie", los cabos de cada bobina salen del motor doblando así el número de cables. Pues ya saben porque algunos motores de paso tienen 8 cables saliendo del motor y ya saben como asociar los pares de cable que corresponden a siempre una de las bobinas! Pero también existen motores de paso con 6 cables saliendo de el! Pues aqui no se sacan ambos cabos de las 2 bobinas conectadas en serie, sino que se saca un cable que va conectado a los cabos unidos entre 2 bobinas conectadas en serie. Pero también aquí ya tienen las herramientas para saber cual cable corresponde a cual. Si el par de cables es una uno de los cabos de una de las bobinas conectadas en serie y el segundo el del centro, entonces si medimos la resistencia el valor de esta será la mitad, que si medimos un par de cable que corresponden a las salidas de las 2 bobinas conectadas en serie, donde la resistencia medida tendrá el doble del valor por incluir ambas bobinas!
Recapacitemos lo escrito. El motor de paso, en breve, MP, sencillo descrito en las imágenes arriba, contiene 2 circuitos eléctricos, cada uno con 2 bobinas conectadas en serie. Dependiendo de la polaridad que le apliquemos a cada circuito, la corriente fluirá a través de sendos circuitos en una u otra dirección. Eso lo conocemos todos de los motores con escobillas que usamos en nuestro hobby, Invirtiendo la polaridad el motor girará en dirección opuesta.
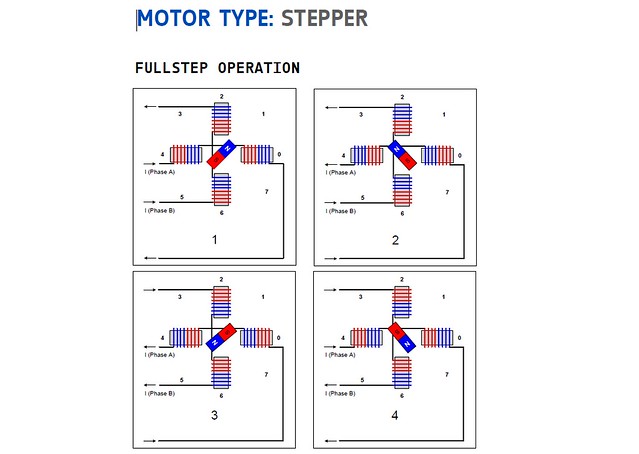
En estas 2 últimas imagenes el asunto se describe de 2 formas, cada uno tocando otro aspecto. La primera imagen muestra con las flechitas la dirección del flujo de la corriente en cada uno de los 4 pasos que representan un giro de 360° de ese MP.
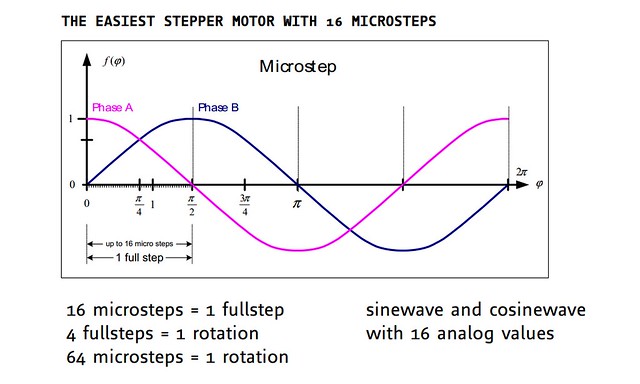
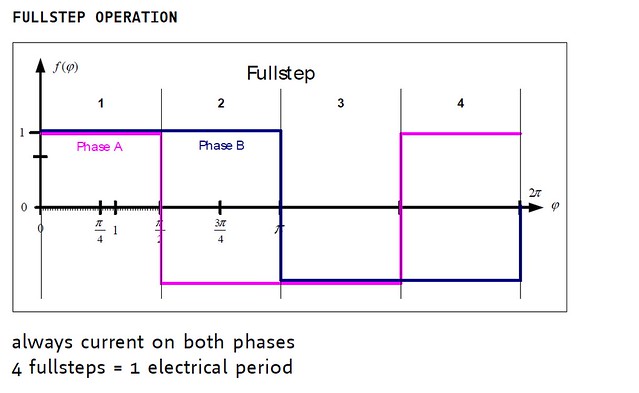
La segunda imagen, no se dejen intimidar, muestra lo mismo, pero en forma de diagrama. En la horizontal vemos los 4 pasos enumerados arriba, y sobre el mismo eje vemos el ángula correspondiente representado como fracción del signo Pi. Para aquellos no matemáticos o donde la época en el colegio donde aprendieron de eso ha pasado mucho tiempo. 2 + Pi equivale 360° o un giro completo, consecuentemente 1* Pi = 180° o medio giro. las 2 curvas, la negra, equivale al circuito "Phase B" y la violeta al otro circuito "Phase A".
Cuando la linea está arriba, donde está la "1", tenemos una polaridad, cuando baja debajo de la linea horizontal, la polaridad opuesta. Creo que no es tan difícil de entender! La razón es que esa forma diferente de describir ángulos y polaridades permite escribir equaciones matémáticas y hacer los cálculos correspondientes, cosa de la que no nos ocuparemos aquí!
Ahora nos vamos a dedicar a otra asunto muy importante en materia de motores de paso, ya verán mas adelante porqué!
La potencia de un motor por ejemplo se describe en vatios [W] y se usa el símbolo "W". La potencia "P" tiene la siguiente relación con la tensión aplicada U y que se define en voltios [V] y la cantidad de corriente que fluye I que se describe en amperios [A]!
Potencia P [W] = U[V] * I[A]
La ecuación por lo tanto dice que la potencia disponible es la multiplicación de la tensión aplicada y de la corriente que fluje!
Por lo tanto que nos dice la placa de tipo de un motor de paso y como podemos influir en la potencia que puede lograr un motor MP? Vayamos paso a paso para no perdernos por el camino!
Todos sabemos, que si le aplicamos una tensión variable a una lamparita, cuando mas alta la tensión aplicada mas intensa es la luz resultante. La intensidad de la luz emitida por ese bombillo esta directamente relacionada a la cantidad de corriente que fluye atravez del bombillo. Cuando mas tensión aplicamos, mas corriente va a fluir. La ley física que describe esta relación se llama la ley de "Ohm"
I [A] = U[V] / R [R]
Otra vez, la cosa es bien sencilla, favor no dejarse intimidar. En la ecuación arriba,
si aumentamos el valor de la tensión también aumenta la corriente.
si aumentamos el valor de la resistencia, reducimos la cantidad de corriente!
Resistencia = R [R] = R[ohmios]
Ahora combinamos estos 2 datos y lo aplicamos a un motor.
La potencia de un motor en vatios se encuentra en la hoja de datos del motor a en la placa de tipo!
Potencia sea = 100 W
Tensión de operación sea 10 V
P = 100 W = 10 V * I (corriente) = 10 V * 10 A = 100 W
Como ven, para que ese motor imaginario tenga una potencia de 100 W con una tensión de 10 voltios aplicada, el motor tiene que ser capaz de resistir 10 amperios de corriente sin sobre calentarse! Eso significa que que tiene que ser un motor de bastante calidad, pues las bobinas son capaz de resistir 10 amperios! Miremos esto en mas detalle. La capacidad de los cables de las bobinas en ese motor imaginario tienen que tener un diámetro adecuado para permitir 10 amperios de corriente fluir atravez de ellos sin generar un calor excesivo! Si a los 2 cables que alimentan ese motor imaginario le aplicamos un multímetro y medimos la resistencia en ohmios interna al motor, estamos midiendo la resistencia del cable que forma las bobinas en el motor, se llama la resistencia interna.
Si ese mismo motor imaginario nos lo imaginamos como uno que solo tiene 10 W de potencia, miremos las mismas ecuaciones ahora para este segundo motor imaginario.
Potencia sea = 10 W
Tensión de operación sea 10 V
P = 10 W = 10 V * I (corriente) = 10 V * 1 A = 10 W
Podemos sacar la conclusión mirando y comparando las 2 ecuaciones para ambos motores imaginarios, que el segundo motor solo se diferencia del primero por el diámetro de los cables usados en sus bobinas! Estos cables deben tener un diámetro mucho menor, por lo que solo permiten 1 amperio de corriente, la décima parte de lo que permite el primer motor! Vale decir que el primer motor físicamente es superior al segundo por permitir que la corriente sea 10 veces mas alta que en el segundo motor.
Usemos esta sencilla cosa que aprendimos para comparar 2 motores de paso de igual potencia!
Motor 1:
P = 12 VDC * 1 A = 12 Watt
Motor 2:
P = 1,2 VDC * 10 A = 12 Watt
Vemos que el motor 2 es de mas alta calidad o rendimiento, pues permite el flujo de corriente 10 veces mas alto! Leyendo las placas de tipo de diversos motores de paso ahora sabemos que el motor 2 es de mas alta capacidad o rendimiento! Tratemos otro detalle muy bien conocido por todos aquellos que conocen los motores de escobillas que usan en sus modelos! Cuando le aplico una tensión mas alta a un motor que aquella definida en la hoja de datos o en la placa de tipo, este motor se va a calentar y así va a durar menos. Si la tensión es mucho mas alta, puede que el motor se dañe, pues los cables de la bobina se funden y el motor se calienta.
Aquí entra un detalle típico para motores de paso. El circuito de control limita la corriente que fluje atravez de las bobinas! Si a ese circuito le indicamos en el caso del motor 1 que la corriente no debe sobrepasar un valor de 1A, el circuito se encarga de eso. Si a ese mismo circuito de control le conectamos el motor 2 y le indicamos que este puede tener un flujo de corriente de hasta 10 A, el circuito recién limitará la cantidad de corriente fluyendo a través de las bobinas del motor de paso cuando este alcanze los 10 A! Apliquemos a nuestros motores 1 y 2 una tensión de 48 VDc por ejemplo y miremos que son las potencias resultantes:
Motor 1:
P = 48 VDC * 1 A = 48 Watt
Motor 2:
P = 48 VDC * 10 A = 480 Watt
Vemos que el motor 2 nos va a brindar una potencia 10 veces mas alta que el motor 1, sin sobrepasar los límites de corriente de cada motor! Una potencia mas alta significa que el motor nos va a brindar mas torque. El resultado de este analisis son 2:
1. Escogan un motor de paso que tenga especificado el valor de la tensión lo mas bajo posible.
2. Tengan disponible en el modelo la tensión mas alta posible!
Ahora existe un último detalle que quiero resaltar. es la del calentamiento de un motor. es correcto decir que a razón de ineficiencias que resultan de la construcción física de un motor y de efectos físicos que reducen la eficiencia, un cierto porcentaje de la potencia con la que alimentamos un motor y que hemos estado analizando, se va a convertir en calor. Por sencillez de los cálculos asumamos que el 10% de esa potencia alimentada al motor se va a convertir en energía calorífica. En el caso de los motores 1 y 2 alimentados con 48 VDCs y comparándolo con lo que pasa cuando la tensión aplicada es la de la placa de tipo de 12 VDC, lo siguiente es válido asumir.
Si alimentamos los motor 1 y 2 con los 12 VDC, la energía calorífica generada por ineficiencias es de 1,2 W y esos motores no se calentarán en exceso, si cumplimos con los requerimientos de difusión de calor de esos motores.
Si alimentamos los motores 1 y 2 con los 48 VDC, la energía calorífica sera de 4,8 W para el motor 1 y de 48 W para el motor 2. por lo tanto el motor 1 esta solicitado en 4 veces la energía calorífica y el motor 2 en 40 veces esa energía!
Un forista describiendo su familiaridad con motores de paso usados en su trabajo cuenta que ya se ha quemado los brazos por tocar accidentalmente un motor de paso en uso! La razón se explica por este efecto y porque circuitos de control de motores de paso no atendían a hacer mínima la cantidad de energía calorífica generada. Hojas de datos avanzadas por esta razón describen también la tensión máxima aplicable al motor sin que este se dañe por energía calorífica generada! Solo como indicación quiero mencionar que los circuitos de control de la empresa Trinamic usados en la placa StepRocker usada en los vídeos que voy a presentar aquí, controlan la corriente que fluye por el motor de paso tomando en consideración de forma inteligente la solicitación del motor y limitando el valor de la corriente fluyendo por las bobinas del motor de paso al valor mas bajo posible para que el torque generado en el motor sea adecuado para el torque que este motor de paso tiene que contrarrestar. Ya lo voy a describir y demostrar en detalle mas adelante en el tutorial. Así es posible reducir la cantidad de energía calorífica generada en el motor y así evitar su sobrecalentamiento.
Sigamos con el tutorial y en este caso me es posible usar un ejemplo de mi velero Carina, descrito en paso a paso. Yo usaré 2 motores de paso para realizar 2 winches para controlar las escotas que controlan la vela mayor y la foque. En ese contexto uso otra característica de motores de paso. Todo lo escrito anteriormente sobre potencias, energía calorífica, etcétera, sobre motores de paso es valido considerando únicamente el comportamiento estático de motores de paso. Repito, no se dejen intimidar por lo de "estático"! Las implicaciones de lo descrito aquí en el tutorial hasta ahora me imagino solo capta o aquel que ya es familiar con la materia o que es genio. Yo ni soy genio ni me considero aún totalmente familiarizado con la materia. En el curso de este tutorial iré presentando mis conocimientos como vayan avanzando. Pero cuando vean los vídeos y vuelvan a leer lo escrito en el tutorial, las implicaciones se volverán mas evidentes. Aún yo hoy uso el tutorial, ya mas avanzado en otros idiomas que aquí en Español, para captar las implicaciones y entender lo nuevo que leo al respecto. Trato en este tutorial de no asumir conocimientos previos y de introducir conocimientos en el entorno que trato de seleccionar como apropiado! Pasemos al análisis del motor de paso dinámico, o dicho en otras palabras, cuando este sea operado, cuando este dando sus pasos.
Sabemos de lo escrito inicialmente y mostrado en las imágenes que usan un motor imaginario de 4 pasos para un giro completo para describir los datos de forma sencilla, que un motor de paso puede consistir de 2 fases, Phase A y B, siendo cada una de estos un circuito autónomo, significa independiente del otro y que cuando aplicamos las polaridades de acuerdo a lo mostrado, el motor dará sus 4 pasos para un giro completo cambiando la polaridad aplicada a cada uno de los 2 circuitos y así invirtiendo el flujo de corriente a través de estos circuitos. Cada uno de estos 2 circuitos contiene 2 bobinas.
Ahora es así, que cuando cambia el flujo de corriente a través de una bobina, o sea cuando la cantidad de corriente o/y su dirección cambian, en la bobina se genera una tensión de polaridad invertida a aquella que aplicamos a la bobina. Esto se llama tensión inducida! Cuando mas rápido es el cambio de la cantidad de corriente que fluye por la bobina y/o de la tensión aplicada, mas alto es el valor de la tensión inducida, la cual es de polaridad opuesta a la que aplicamos a la bobina.
Usemos números para tratar de explicar esto!
Digamos que aplicamos 24 VDC a una bobina, ahora invertimos la polaridad de la tensión aplicada, sería -24 VDC y esto lo repetimos muchísimas veces por segundo. En un extremo esto puede conducir a que a una tensión aplicada externamente a la bobina de +24 VDC, la bobina genere una tensión inducida de -24 VDC.
24 VDC aplicada externamente menos 24 VDC de polaridad invertida inducida generada en la bobina resulta en una tensión de 0 VDC! Para la potencia del motor de paso resulta lo siguiente:
Potencia del motor al estar parado en una cierta posición, no girando:
P = 24 VDC * 10 A = 240 W
Ahora el cálculo para este mismo motor de paso, pero girando tan rápido, que la tensión inducida es de 24 VDC, pero polaridad invertida:
P = (24 VDC - 24 VDC) * 10 A = 0 VDC * 10 A = 0 W
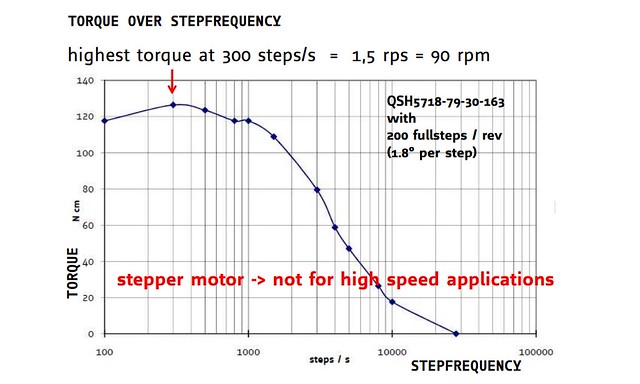
Cuando mas alta la velocidad con la cual un motor de paso da sus pasos, mas alta la tensión inducida que tiene polaridad invertida, cuando menor la tensión disponible.
De allí resulta que un motor de paso tiene la potencia mas alta, ofrece el torque máximo, cuando no gira y mantiene su posición!
De allí resulta que un motor de paso pierde potencia y tiene menor torque disponible cuando mas rápido haga sus pasos!
De allí resulta que un motor de paso no es adecuado cuando se requiera una alta velocidad de giro!
Considerando este comportamiento de motores de paso fue una de las razones por la cual me decidí usar un motor de paso para construir un winche para el control de las escotas.


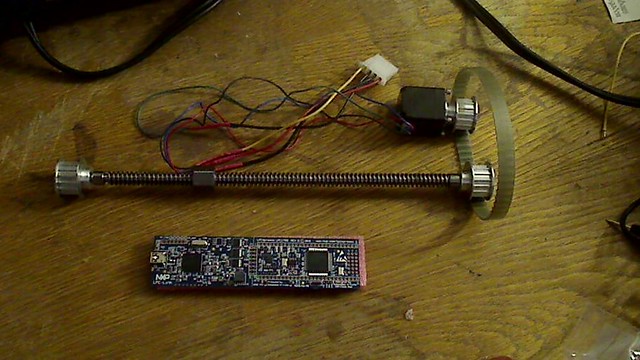
Por esa razón me estoy construyendo un tambor de máximo radio que quepa en el casco de mi velero, para así poder usar el motor de paso al mínimo de velocidad para lograr un máximo de torque disponible para contrarrestar al torque resultante de las escotas que mantienen la vela en su posición cuando el viento presiona las velas! Como pueden imaginarse, la mayor parte del tiempo el tambor mantendrá su posición ofreciendo así el motor de paso un máximo de torque!

Tengo pensado que las escotas para la vela mayor sean realizadas como lo muestra esta foto del original de un velero de la clase J y que en mi modelo, el velero Carina, exige del winche de poder mover las escota sobre un largo de 840 cm. El tambor lo he dimensionado de tal forma, que la circunferencia del tambor que recibe la escota será de 40 cm! De allí resulta que el motor de paso no va a girar por mas de 21 giros completos!
Normalmente el uso de un aparejo duplicando la longitud de la escota movida lleva a solo tener la mitad del torque disponible. Gracias al torque del motor de paso y de los 40 VDC máximos disponibles a bordo de mi velero y a que el motor de paso solo tiene que moverse despacio y poco, logro esos 840 cm de desplazamiento de la escota sin tener pérdidas de torque como resulta por el camino tradicional! Claro, como al empezar las investigaciones, los estudios y experimentos e ir aprendiendo la materia, ahora estoy seguro que mi sistema de control de escotas ni requiere las capacidades de energía que he puesto en mi velero, ni tan tremendas dimensiones de toda la infraestructura física. Cuando empecé me aseguré que en mi velero iba a haber un máximo de capacidad eléctrica, de tensión y las dimensiones físicas máximas posibles en el casco de mi velero. A fin de cuentas no quería llegar a un punto, donde todo funcionaba, pero donde no podría navegar mi velero mas que 10 minutos antes de agotar los recursos.
Otra de las características de un motor de paso es el que siempre se conoce la posición actual del motor. Esto se logra definiendo en software un punto como el paso "0" e ir contando el número de pasos que el motor de paso hace en una u otra dirección partiendo de allí. Si ademas se cuida de evitar o reconocer cuando el motor de paso falla en algún paso, sea porque se mueve bajo la solicitación u otra razón, este conteo de paso nos dará la posición actual del motor de paso y traducido a su uso como winche me dice si tengo que dar o recoger escota! En detalle entraré en el lugar adecuado, por ejemplo moi paso a paso del velero Carina o/y aquí en el tutorial.
Pero existe otro detalle de un motor de paso que hay que considerar. He escrito que el torque máximo del motor de paso ocurre cuando este no gira, lo que en consecuencia también significa que el consumo máximo de energía ocurre en este momento.
Sigo en el tutorial presentando mi nuevo puesto de trabajo electrónico en mi taller y partiendo de allí la parte física de como preparo los experimentos presentados en YouTube y también de la software gratuita que uso para controlar la placa de control de motores de paso llamada StepRocker y que se puede comprar en todo el mundo por precios bajos. La software gratuita se llama IDE, lo que es el nombre genérico para sistemas de desarrollo de software, literalmente en Inglés, Integrated Development Environment, en Español: Entorno de desarrollo integrado.

En esta imagen ven mi puesto de trabajo electrónico con el listón de tensiones DC arriba, el osciloscopio a la derecha, estante para cajas para partes y enfrente de este estante un dispositivo que me permite conectar hasta 4 tensiones diferentes y que para cada una de las 4 tensiones me da 5 posiciones a las que puedo conectar atornillando un cable de alimentación. Para cada una de las 4 tensiones tengo un interruptor que me permite conectar y desconectar las alimentaciones eléctricas. Ademas ven uno de los multímetros que usaré y 2 motores de paso pequeños.
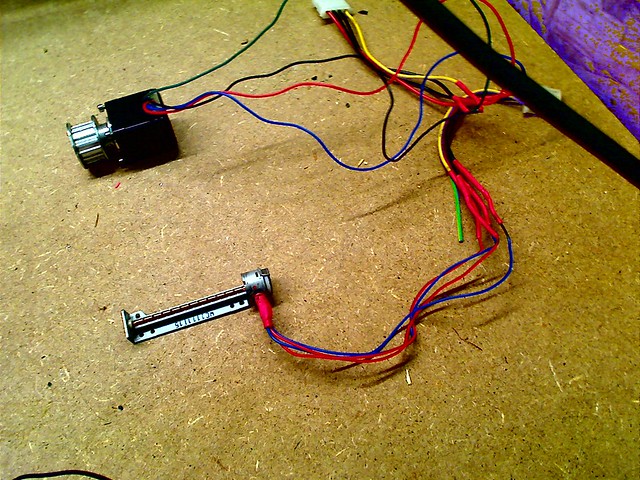
En esta foto muestro en detalle los 2 motores de paso pequeños. El mas grande es de 28 x 28 mm y el mas pequeño es sacado de un disco CD y que allí se usa para mover la cabeza del lector y que tiene un diámetro de solo 12 mm!

Finalmente en esta foto ven el entorno usado para los experimentos que verán por vídeo. La placa es la llamada StepRocker y es el controlador para motores de paso de la empresa Trinamic. A la derecha, abajo, fuera de la imagen esta el motor de paso usado y que como todos los motores de paso he provisto con un enchufe que me permite cambiar de motor de paso fácilmente. Los 2 multímetros los uso para hacer visible en los vídeos el valor actual de la tensión y de la corriente.
Seguimos ahora introduciendo la IDE usada para controlar los motores de paso y que permite asignar valores a los diferentes parámetros que impactan el funcionamiento de un motor de paso conectado al StepRocker. Quiero usar estos parámetros para introducirlos y así, en conjunto con los vídeos, ayudarles a entender la función y el impacto de estos parámetros. Resulta que Trinamic, que me ha autorizado por escrito, usar sus materiales y vídeos en estos tutoriales, de forma incomparable en la industria permite influenciar los mas diversos parámetros asignándoles valores a las variables y haciendo posible así ganar un entendimiento de motores de paso aún ajeno a la mayoría de los actores en este sector.
Este programa se puede descargar de forma gratuita aquí!
Para conectar la placa del StepRocker a un ordenador o PC, se usa la interfaz USB y para ello se requiere un driver especial llamado LIBUSB. Cuando mi familia me regaló la placa de StepRocker como regalo de navidad, la versión disponible entonces, reemplazaba todos los drivers para la interfaz USB en el PC u ordenador, resultando en que el PC quedaba totalmente bloqueado, pues por ejemplo el ratón y el teclado conectados por USB dejaban de funcionar. Volviendo a arrancar el PC en modo limitado permitía borrar ese driver y el PC volvia a funcionar. Ahora, desde la versión 1.2.6.0, descargable aquí y utiliar el "filter" para realizar la instalación limitada a la placa usada por ejemplo. Lo mismo se necesita cuando se piensa usar un grabador de programas con interfaz USB de microcontroladores! Para instalar el driver es necesario conectar la placa StepRocker al PC, para que este "Filter" presente la placa StepRocker y así instalar el driver de forma apropiada.
Una vez que se arrance la IDE de Trinamic y aparece en la pantalla la ventana como lo muestra la foto, vale verificar bajo "Setup" las conexiones y ver que el StepRocker fue positivamente identificado, sabiendo así que el IDE esta comunicandose con el StepRocker.
Pinchando la imagen de la mano en la barra de símbolos se abre la siguiente ventana:
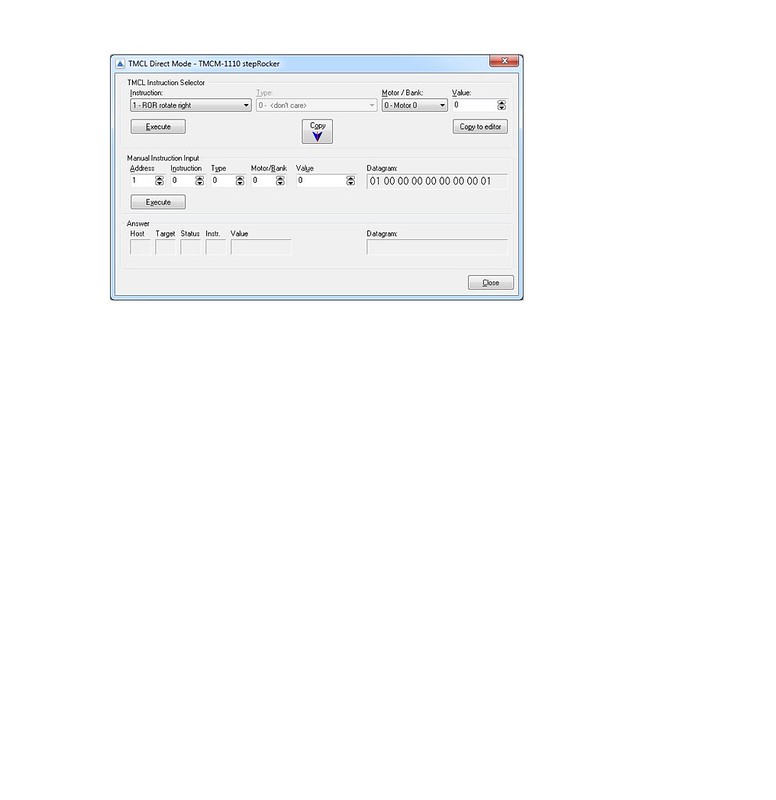
La ventana es el centro de control que usaremos para controlar la placa StepRocker y esta ventana consiste de 3 secciones separadas verticalmente:
La sección bien arriba titulada: "TMCL Instruction Selector" permite seleccionar los para metros y la instrucción de lo que queremos hacer, ademas de dar un valor para el parámetro que deseamos influenciar.
debajo aparecen 3 botones, de los cuales ahora solo usaremos el de la izquierda llamado "Execute". y que como el nombre lo indica hace que la IDE ejecute la instrucción seleccionada tal cual lo definimos.
La sección central de la ventana indica lo definido arriba, una vez tal cual aparecería en un program, ya me explico mas tarde y ademas tal cual un controlador tendría que escribir en los registros de la placa para lograr el mismo efecto como lo definimos en la sección de arriba de esta ventana. evidentemente también aquí el botón "Execute".
Finamente en la tercera sección abajo, recibimos la confirmación de la instrucción definida en la sección de arriba y cuando usamos la sentencia "Leer", nos da la respuesta que recibe de la placa. Finalmente en este sección un botón para cerrar la ventana. Es importante "Cerrar", "Close" la ventana y la aplicación IDE correctamente para evitar que la interfaz quede asignada ala sesión anterior y evitando así acceder la placa sin volver a arrancar el PC!
Empecemos a mirar en detalle las opciones del programa empezando por listar aquellas opciones que vamos a usar de la sección de arriba de la ventana de control:
Titulo: Instruction
1. ROR: rotate right Girar hacia la derecha
2. ROL: rotate left Girar hacia la izquierda
3. MST: motor stop Motor Stop
4. MVP: move to position Ir a la siguiente posición
5. SAP: set axis parameter escribe Parametro
6. GAP: get axis parameter Leer Parametro
las 6 opciones de una lista de 139 son aquellas con las que vamos a empezar a dedicarnos. Muchas de las otras opciones se usan cuando se escriben "programas" basándose en estas sentencias y que pueden ser grabadas en la placa permitiendo que esta cumpla funciones mas complejas. En el caso de mi uso para controlar el winche esto podría implicar toda la serie de sentencias necesarias para que el winche haga de forma autónoma las operaciones requeridas para cuando el velero haga un viraje. Pero como ya he escrito, detalles mas tarde!
Titulo: Type
0. target (next) position Posición destino
1. actual position Posición actual
2. target (next) speed Nuevo velocidad
3. actual speed Velocidad actual
4. maximum positioning speed Velocidad máxima permitida
5. maximum acceleration Acceleración máxima permitida
6. absolute maximum current Corriente máxima permitida
7. standby current Corriente en "Standby"
8. target position reached Indicación que posición destino ha sido alcanzada
9. reference switch status Estado de Interruptor de fin de carrera
10. right limit switch status Estado de Interruptor de fin de carrera derecho
11. left limit switch status Estado de Interruptor de fin de carrera izquierdo
135. actual acceleration Acceleración actual
138. ramp mode Modo Ramp
140. microstep resolution Resolución de microüpasos
160. step interpolation enable / disable Interpolación de pasos activo / deactivado
Para evitar malentendidos: Yo escribo este tutorial sin ánimo de lucro y no estoy relacionado mas que como cliente y persona que usa los circuitos de Trinamic. Las componentes de Trinamic las considero altamente líderes en este mercado y la combinación de un controlador del tipo ARM Cortex M0 y las componentes de Trinamic de forma óptima para el usuario combinan la implementación de funciones en Hardware y Software.

Como pequeño detalle aquí les quiero presentar la siguiente generación! La comonente negra en el centro de la placa contiene todo lo que la placa StepRocker contiene, a diferencia de la placa StepRocker que esta limitada a una tensión de alimentación de 25 VDC, esta permite hasta 60 VDC. Esta placa me permite experimentar con ese módulo y tiene las componentes de potencia, los MOSFET adicionales para poder controlar corrientes mas grandes. tengo la intención de desarrollar una placa propia donde solo se montará el módulo para así lograr una solución económica como lo necesito en varias partes de mi velero. Para el control de los 2 motores de paso fuertes para el control de las escotas usaré una de estas placas, con las cuales se comunicará mi placa LPCXpresso 1769 y que así será capaz de controlar varios módulos y periferias adicionales que tengo pensadas!
" onclick="window.open(this.href);return false;
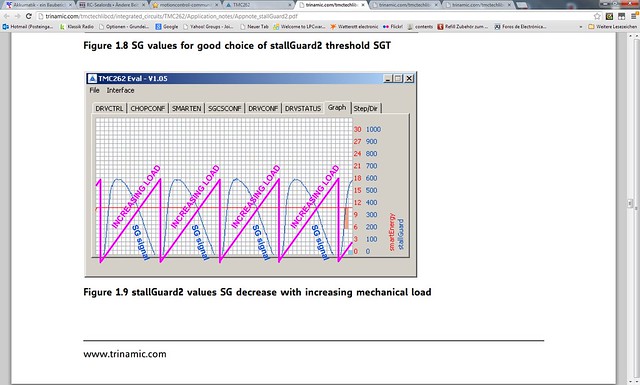
Este Vídeo de Trinamic, como lo he escrito mas arriba, usado con permiso por escrito de Trinamic, muestra una función de Trinamic que se llama "StallGuard" y que trabaja usando funcionalidad que entre otras permite que el control del motor de paso reaccione de forma apropiada si la función se encuentra con un obstáculo. Esto es de vital importancia, pues el inmenso torque que tienen los motores de paso que utilizo fácilmente pueden destruir todo el modelo en caso de mal función!
" onclick="window.open(this.href);return false;
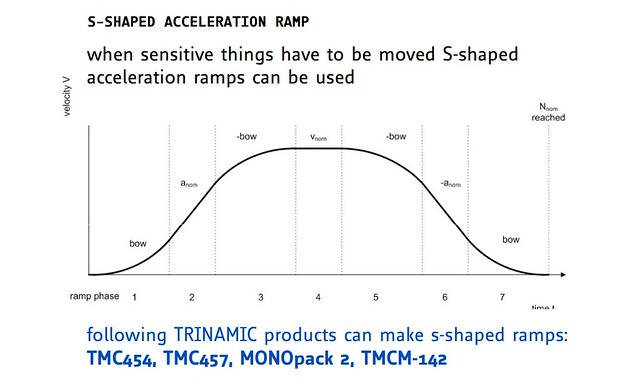
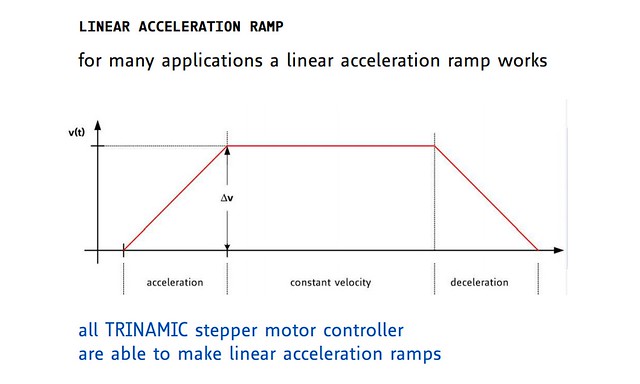
Este vídeo muestra las posibilidades de controlar la aceleración y la deceleración de un motor de paso de tal manera que como en el vídeo mostrado, el agua en un vaso queda tranquilo, a diferencia de no usar esa técnica especial, donde se ve como el agua en el vaso tambalea a razón de la aceleración del vaso de agua.