Cada uno de estos áreas en el contexto de mi proyecto del Carina presenta un gran número proyectos parciales en el conjunto de proyectos del Carina y las posibilidades que se abren en mi propósito dedicado al modelismo naval son para mi fascinantes y me permiten reflexionar sobre estas posibilidades y de como aplicarlas a mi proyecto de modelismo naval. Si les presento todo esto justificadamente me podrían criticar. Así me he decido desde algún tiempo compartir parte de estos temas en foros mas adecuados como el forosdeelelectronica.com y en foros dedicados mas al tema de la informática. Sin embargo mi motivación para seguir con estos numerosos estudios y los largos tiempos de estudio y experimentación es el de aplicar esto a mi proyecto de modelismo naval.
Permítanme compartir con Ustedes que los temas que toco en el contexto de mis proyectos estos se benefician muchísimo de los rasantes avances de tecnología, por lo que mi lento paso en estas actividades se beneficia de ello. Pero finalmente ahora mis trabajos del taller, lejos aún de ser completados, han avanzado al punto que hoy mi taller ya brinda la plataforma donde puedo trabajar y experimentar. Hoy no mas he vuelto a hacer una compra por Internet de accesorios para mi laboratorio electrónico que ya tienen como objetivo el establecer el entorno concreto de experimentos!
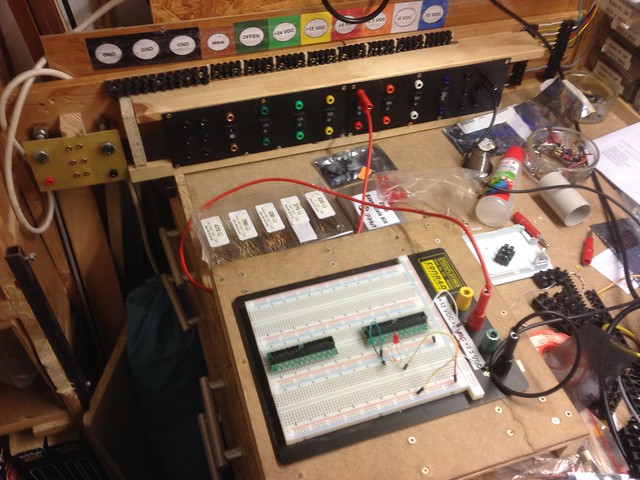
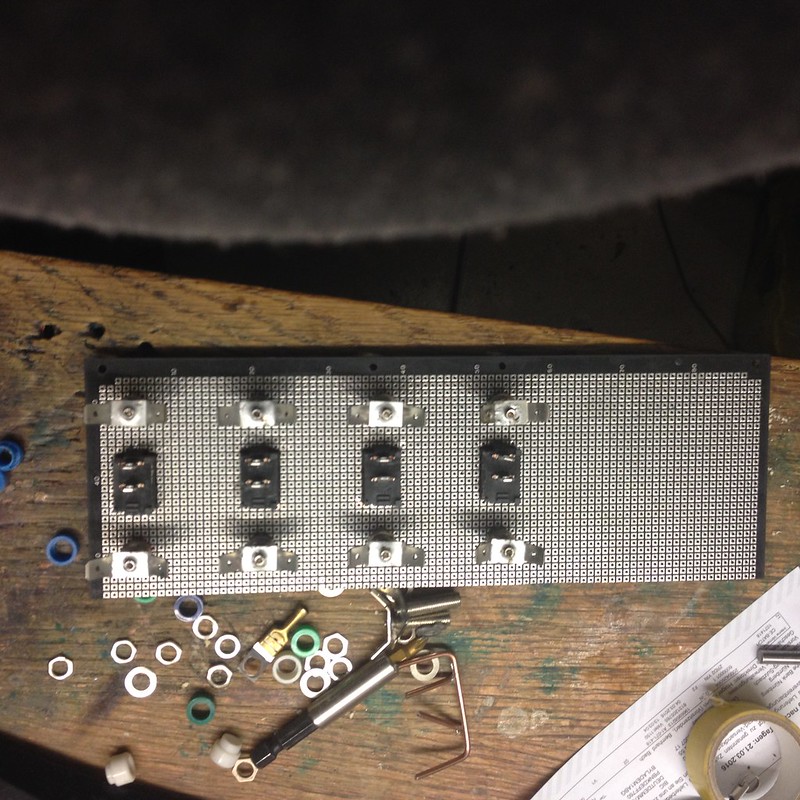
Esta foto muestra una vista sobre la mesa de trabajo de mi laboratorio y que habiéndolo alcanzado me capacitaba para avanzar en trabajos concretos relacionados a los experimentos que tengo planeados para investigar mi sistema de control de escotas.

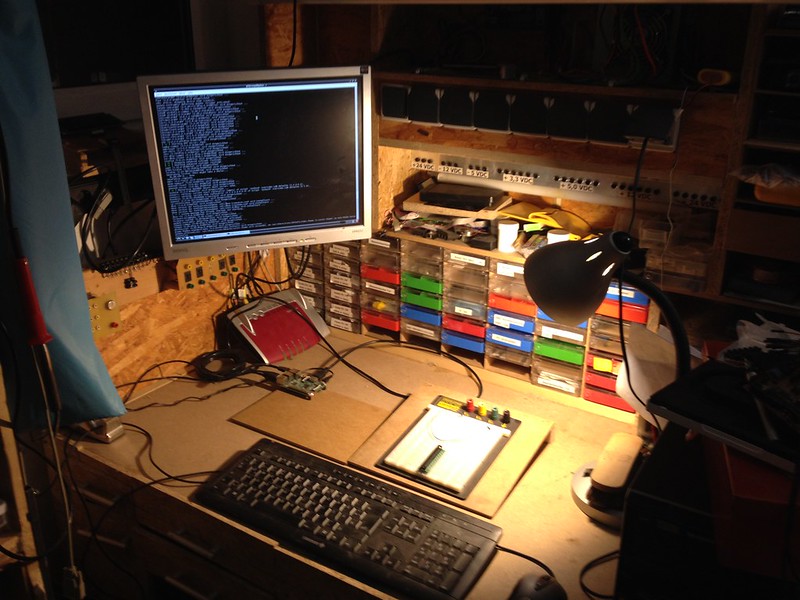
Esta foto muestra una vista sobre el escritorio de oficina dentro de mi taller. Aunque el caos continúa reinándo en mi taller estas 2 fotos muestran como ya he logrado un cierto orden en ciertas áreas de mi taller. Igualmente las superficies de mis 2 bancos de trabajo ya empiezan a deslumbrar debajo de la multitud de cosas aún no organizadas.
Mi intención actual es controlar mis experimentos y las placas de controladores desde mi PC que "solo" tiene 2 pantallas, ahora una tercera ya me sería útil pero fuera de mis posibilidades económicas! Trato de explicarlo en conjunto con al menos la próxima foto:
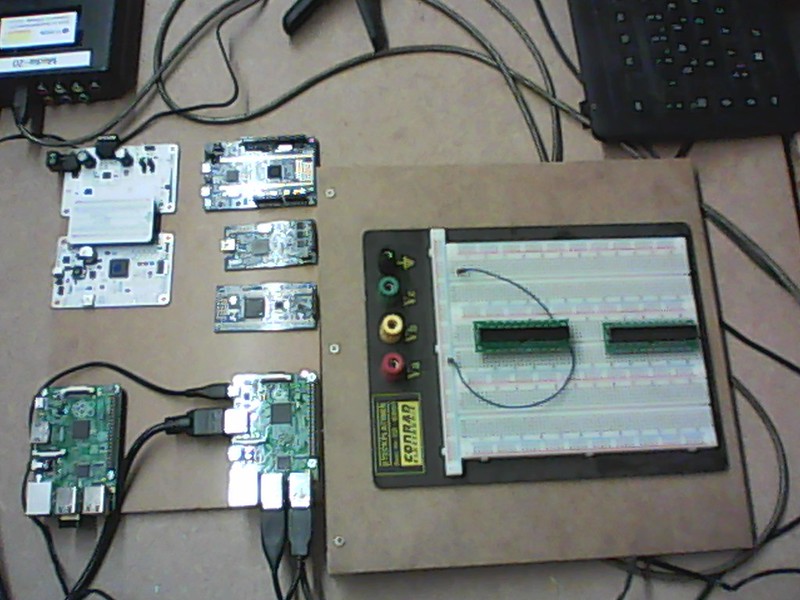
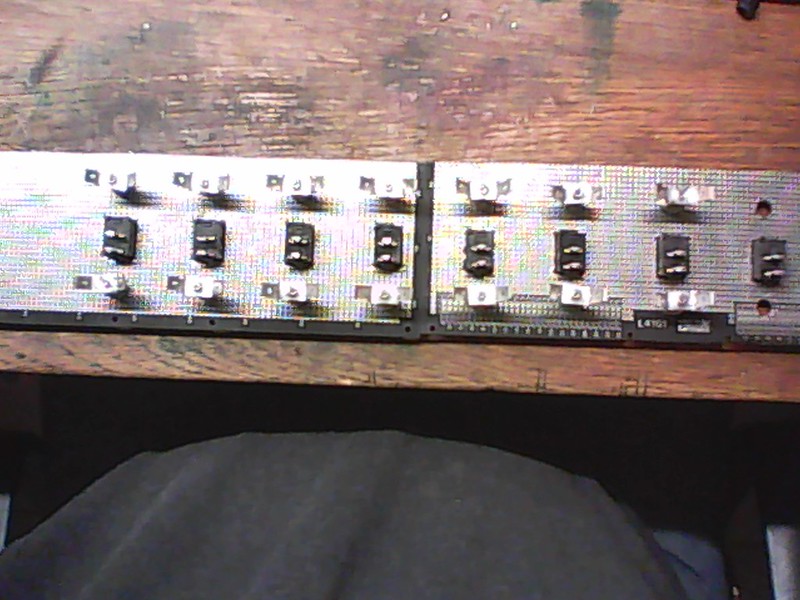
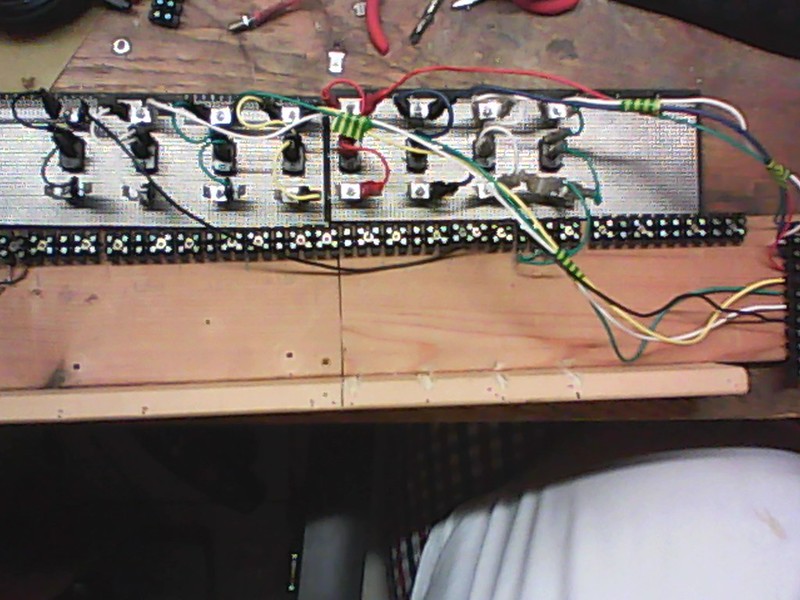
Esta foto muestra como estoy trabajando en definir e implementar módulos que me permitan combinando estos módulos ir armando los diversos entornos requeridos para mis primeros experimentos!
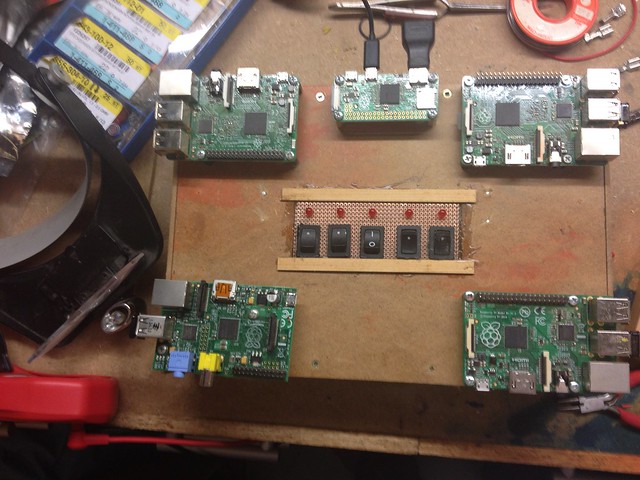
A la derecha aparece el módulo con el tal llamado "protoboard" que permite establecer circuitos sin la necesidad de crear placas implementando las pistas usando cables como el que ven sobre el protoboard. las 2 placas que ven insertadas en el protoboard son placas que me permiten tener acceso a los 40 pines de mis 2 placas "RaspBerry Pi"! Compré 2 porque cuando compré las mas avanzada entonces, la RaspBerry Pi B+, al poco tiempo salió la placa "RaspBerry Pi 2B". Debido al bajo costo de estas placas pude encontrar los fondos para la compra de la segunda en corto Raspi2. En la primera foto de esta configuración solo había una raspi , en esta foto 2. El cable enchufado a la izquierda de la placa a la derecha es la que conecta la pantalla por HDMI al raspi!
Como todos tenemos sufridas experiencias en nuestros PCs, cuando sale una nueva versión de Windows resultan problemas a resolver antes de poder seguir donde ya se estaba. Pues bien, las raspi, al igual que los PCs usa un sistema operacional. No es Windows, sino una variante, se denomina "distribución" de Linux y se llama Raspbian, combinando Raspi y Debian en su nombre para indicar que es para el uso con las raspi. Pues bien, la versión con que arranque se llamaba "Wheezy" y la nueva se llama "Jessie"! debido al rasante paso de los avances tecnológicos en los campos donde se usa las Raspi es justificable el usar la versión mas moderna. El problemita con el que me encontré fue que de pronto la placa Raspi no activaba la interfaz "WiFi"" WiFi, la conexión inalámbrica a la red de mi casa es la forma moderna de comunicación entre placas electrónicas cuando cables de LAN u otros eran la única opción disponible anteriormente. Reflexionen el impacto que esto tiene en nuestra afición! Si puedo establecer comunicación inalámbrica entre mis placas y mi PC, no sería posible lo mismo con un teléfono y una tableta? No sería posible como lo es con las tabletas y teléfonos tener las opciones de mantener la comunicación con una placa por telefonía de datos, WiFi instalada en nuestros modelos? Pero volviendo:
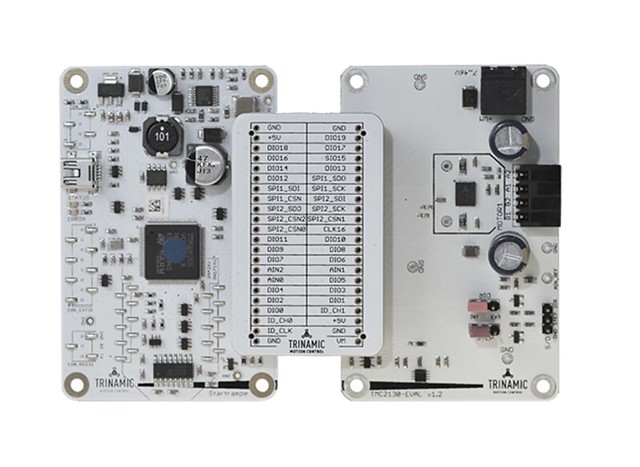
Cada una de las 2 placas raspi de mi entorno viene con su propia dirección "IP", algo como 168.0.0.20. Pues he aprendido como modificar las iniciaciones de mis placas raspi con el so Jessie para asegurar que la conexión Wifi sea activada! No es difícil, solo hay que saber como y donde. No creo que presentar esto sea lugar adecuado este hilo! Las placas raspi reciben la alimentación eléctrica usando un enchufe del tipo micro-USB, tipo B. Es usado exclusivamente para alimentar la placa raspi, no para intercambio de datos. Para ello mis placas vienen con 4 interfaces USB. Por lo general lo razonable es usar un enchufe de alimentación eléctrica que de 5 VDC y hasta 2 A. he empezado mis estudios de la placa raspi usando uno así. Pero la foto muestra que sin organizar de forma adecuada los muchos cables resultan en un entorno de experimentos caótico y por lo tanto propenso a cometer errores que pueden dañar las placas y circuitos. He puesto de forma provisional y investigativa otras placas con controladores que serán usados en mis experimentos. A la izquierda arriba esta el kit de evaluación moderno que reemplaza la placa "stepRocker" que usé en mi tutorial avanzado sobre motores de paso. De las 3 placas que consiste el kit la de arriba en esta foto es la placa con la componente controladora de los motores de paso de la empresa Trinamic. Tiene el tamaño casi igual que la vieja placa stepRocker o la intermedia que usé, motionCookie. La inferior es la placa con el controlador ARM Cortex M4 de la antigua Freescale, hoy parte de NXP! La placa en el medio pasa todas las pistas entre el controlador ARM y el Trinamic haciendo posible así tener acceso a todas estas pistas. Cada pista es accesible por 2 pines hembra, similares a aquellas de la protoboard.
A la derecha del kit puse arriba una placa de la segunda versión de las placas LPCXpresso, en este caso uso la placa LPCXpresso que me regalaron hace un año en la feria en Nuremberg. debajo ven 2 placas que en conjunto representan la primera versión de la placas LPCXpresso, aquí la LPCXpresso1769 que quiero utilizar en mi modelo! La placa arriba de las 2 con interfaz USB es el tal llamado "Link" que permite que el entorno integrado de programación de las LPCXpresso, en corto IDE, se comunique con la placa usando la interfaz "JTAG" que permite de forma muy potente programar e identificar errores, el tal llamado "debug", mientras que son ejecutados, no en un simulador como es el caso en IDEs mas antiguas y menos potentes. Yo he separado las 2 partes logrando así "ver" el tamaño real de la placa que será usada en el modelo Carina. la versión 2 arriba, como se puede ver es mas grande, pero al igual quel las placas de kit de Trinamic es mas útil en la fase de diseño y experimentación por permitir el acceso a todos los pines.
Actualmente estoy llegando a la conclusión que el combinar las placas LPCXpresso y las raspi en un módulo como el aquí mostrado es mejor solución. El kit en combinación con otro kit que tengo para el sensor magnético angular los combinaré en otro módulo! Conexiones físicas entre estas placas tendrá lugar en el protoboard en lo posible!
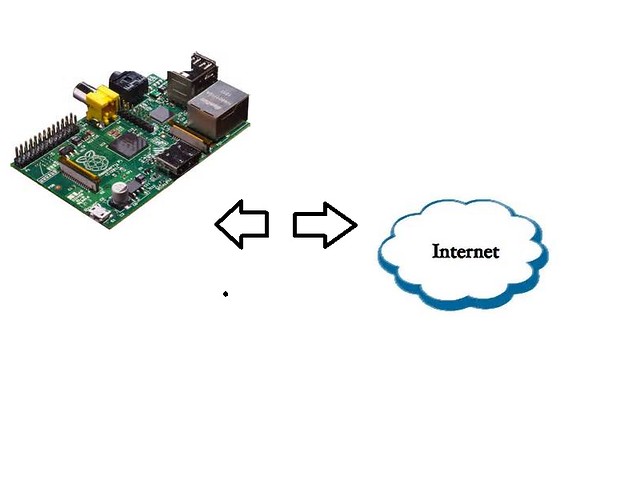
Aquí llego a presentar otro aspecto que requiere saber lo anteriormente escrito hoy y tener en mente el gráfico de bloques que de forma muy abstracta muestra de que componentes mi sistema de control de escotas se compone.
En vez de la pantalla que tengo conectada al raspi en la derecha de la foto con el cable HDMI, es el cable debajo del cable de alimentación eléctrica por el enchufe micro-USB-B usaré la comunicación Wifi desde el PC tanto para presentar en una ventano del entorno Windows de mi PC. Tendré una ventana para cada una de las 2 placas Raspi. Igualmente no tendré que conectar mi teclado y ratón a las placas Raspi, pues teclado y ratón del PC cumplirán estas funciones dentro de las ventanas en el entorno del PC.
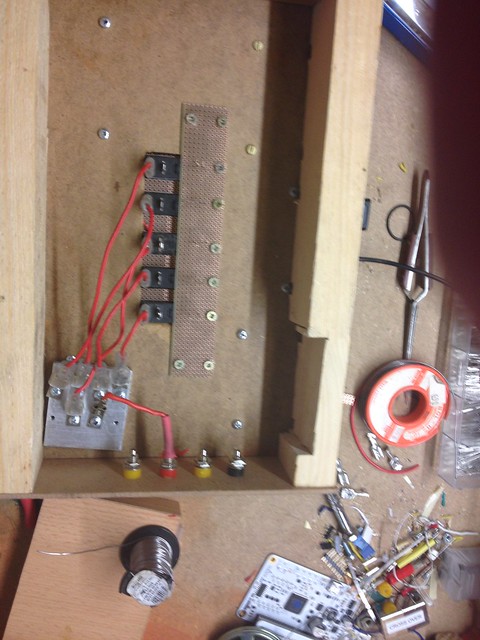
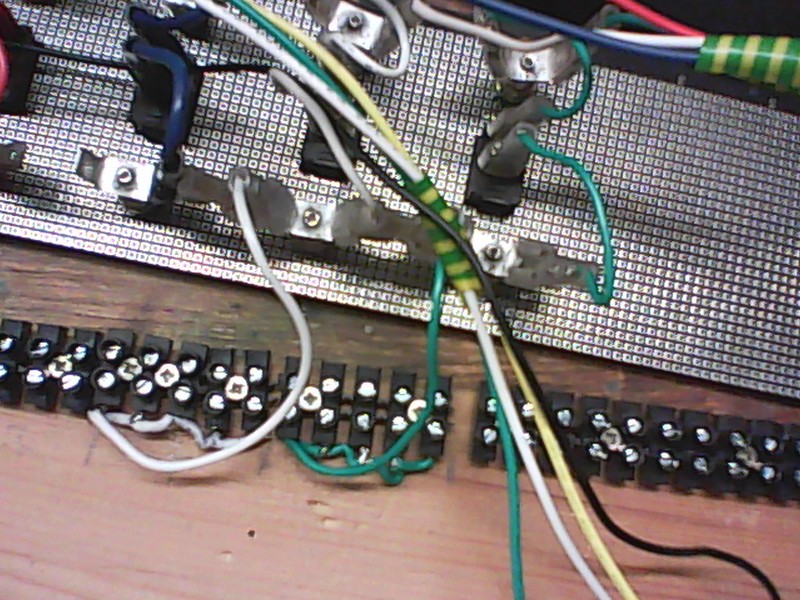
El resultado de esto será, como lo vemos en la segunda placa raspi a la izquierda. esa cosita color latón y negra que ven insertada en el conector USB inferior a la izquierda del raspi es el módulo WiFi que conecta la Raspi a mi red local. Queda por solucionar el asunto de las alimentaciones eléctricas del entorno experimental! El conectar una fuente por un cable a un raspi es inevitable. El usar una fuente individual que me obliga a sacar del enchufe la fuente para desconectar y apagar la placa raspi por lado hace que la mecánica de los enchufes sufra, hay que tener 2 fuentes, uno para cada rasp mas fuentes adicionales requeridas en el entorno experimental!
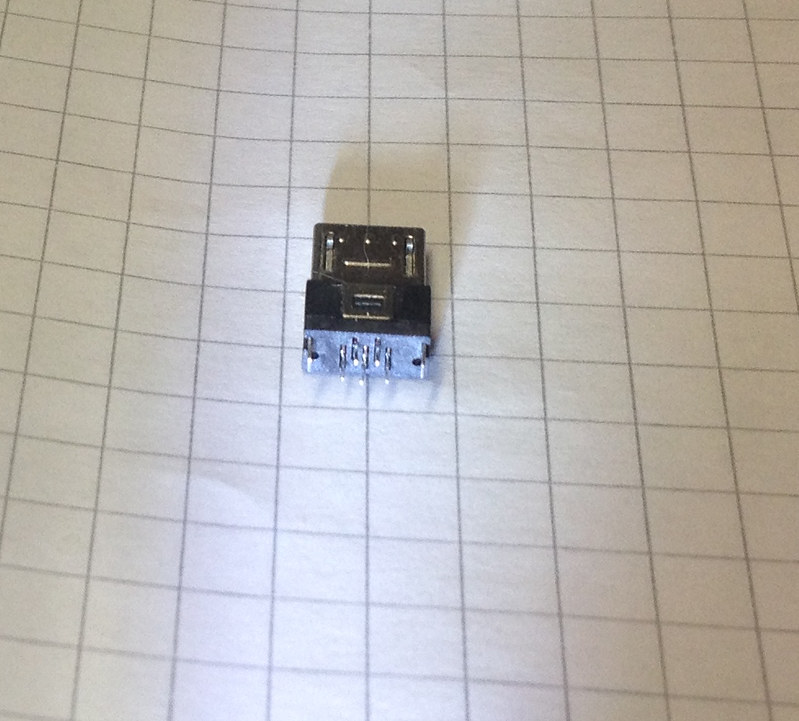
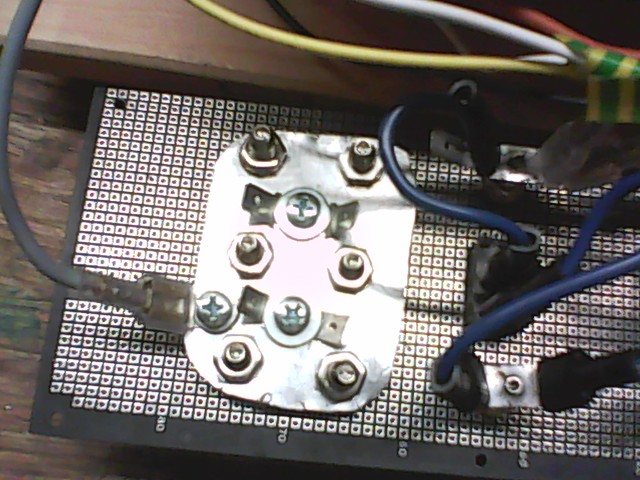
Empecé comprando enchufes hembra micro-USB-B como el que ven en la foto. Tuve algunos problemas en encontrar en el Internet a cuales de los pines del lado donde va el cable debo conectar los polos positivo y negativo. Resulta que de los pines machos, son 5 en 2 niveles, 2 y 3 los 2 externos de los 3 son los correctos. Al momento todavía ando indeciso de donde y como conectar los cables de alimentación eléctrica. Por un lado, las raspi requieren ser alimentadas con 5 VDC, pero los pines de la placa no resisten 5 VDC, solo 3.3 V! Las placas LPCXpresso tambien requieren de 3.3 VDC. De allí resulta que circuitos que armo usando estas placas requieren de 5 VDc y de 3.3 VDC pero si confundo las fuentes me daño las componentes. la famosa y tenebra ley de "Murphy" dice que un evento es mas probable cuando mas sea el daño que ocasione y que daños siempre ocurren en partes para las que no se tienen repuestos, o sean mas difíciles de conseguir o cuesten mas!
De allí resulta que tengo que definir una solución que reduzca la posibilidad de cometer errores, que evite el caos de cableado que muy pronto ocurre. Imagínense no mas el módulo con las placas que mostré arriba. Cada una conectada a su fuente de alimentación eléctrica, cableado de implementar un circuito y demás. Eso acaba siendo un caos tal que la probabilidad de errores aumenta.
Completo mi reporte de hoy presentando las 2 herramientas que tengo disponible para monitorear, decodificar y analizar los datos que fluirán por los circuitos de un entorno experimental.

Analog Discovery es una herramienta que me compré para los experimentos en conjunto con el curso de electrónica análoga. esta herramienta multifuncional tambien ofrece entre muchas otras funcionalidades la de analizador lógico. La segunda herramienta que tengo como analizador lógico es la "Open Bench Electronic Sniffer":

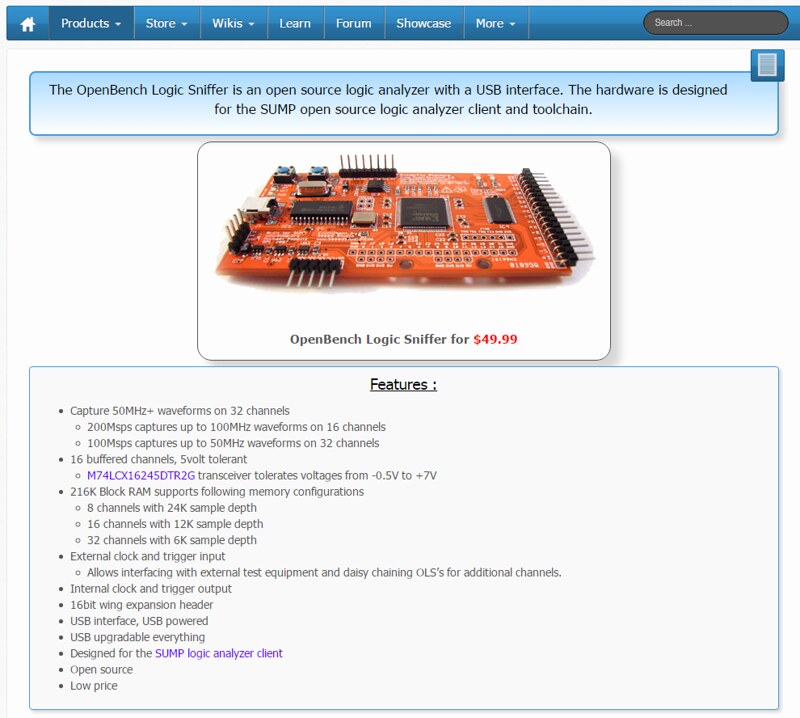
Cada uno de estos analizadores lógicos ofrece la función de poder grabar el flujo de señales digitales de hasta 16 pistas y además es capaz de decodificar los protocolos de de buses de comunicación como del RS232, del I2C, del ISP y muchos otros, permitiendo así ver de forma legible por humanos los datos transportados usando esos protocolos. Así puedo por ejemplo analizar que comunicaciones tienen lugar entre el controlador y la componente de control de motores de paso, al igual que del flujo de datos dentro de un entorno de mis experimentos.
Esto es de gran ayuda para encontrar las causas de posibles malfunciones y de corregirlas, al igual de entender como ciertas funciones son implementadas, para así poder replicarlas. Paro aquí por hoy para decirles que apenas me lleguen las partes compradas en el Internet hoy me lleguen e implemente por ejemplo la alimentación eléctrica de mis entornos experimentales.
Releyendo mi contribución de hoy veo confirmada mi justificación de limitar mi apoyo a aquellos que quieren hacer el curso de la tarjeta experimental a resolver sus dudas y problemas, pero de no querer dedicarme a ofrecer soluciones que pudieran ser utilizadas directamente en nuestros modelos. Ayudo para aprender y así poder hacer las cosas uno mismo, pero no para replicar la milésima solución de alguna función ya disponible en el Internet. En esta década desde que fui atacado de forma personal y ofensiva por ciertos sujetos del foro español de modelismo naval a hoy veo mi justificación de querer seguir aprendiendo y no de replicar cosas. Les aseguro que al empezar el proyecto de modelismo naval hace década y media ni de cerca me pudiera haber imaginado con que cosas me ocupo hoy! Y para volver a repetir de lo que estoy absolutamente cierto! por la forma como investigo, experimento y me dedico a nuestra afición siempre quedaré siendo un aprendiz y como tal ni de lejos me considero superior u otros modelistas navales como inferiores! Mi respeto y admiración vale tanto para las personas y los trabajos de los verdaderos maestros y expertos, como también para modelistas como este joven cuya foto su padre me ha permitido usar:

Así es como nacen los futuros modelistas navales y como la juventud puede aprender a dedicarse a una afición sana que le enseña perseverancia y dedicación! Este muchacho, ya han pasado casi 5 años y medio orgullosamente me presento su modelo construido usando cajetillas de cigarrillos!














")