Hola amigos, ha pasado mucho tiempo desde que actualicé por última vez mi paso a paso del velero. En ese tiempo he estado muy ocupado por un lado recuperándome del primer infarto cerebral, había sufrido bastante por medicamentación inapropiada, sufrí varios paros cardiacos que dejaron lesiones de mis células grises y llevaron a la implementación de un marcapasos. Pero como en el modelismo y en este proyecto, si hago algo, lo hago de forma extrema! Así pues a los 10 días que me implantaron el marcapasos me dio una embolia en el hombro derecho debido a lo cual tomé un medicamento llamado Xarelto usado para evitar embolias y eliminar las embolias existentes. Eso me ayudó a que el segundo infarto cerebral fuera bastante leve. Así pues sigo luchando por lograr mas estabilidad de mi salud y por ejercitar mis células grises para que estas se reorganicen y así eliminen la falta de concentración y persistencia de la que sufro. Que mejor medicina que nuestra afición!
Así por un lado he seguido los trabajos en el velero, pero lentamente, pues tuve que hacer mayores trabajos de mantenimiento a mi fresadora. Además un buen amigo Español me ha ayudado de forma increible a organizar mi taller y a expander las funcionalidades existentes. En el paso a paso del taller escribo sobre los trabajos, aún no completados en ese taller, pero quiero aquí dar reporte de un nuevo aspecto tecnológico que estoy abordando como parte de mi proyecto del velero.
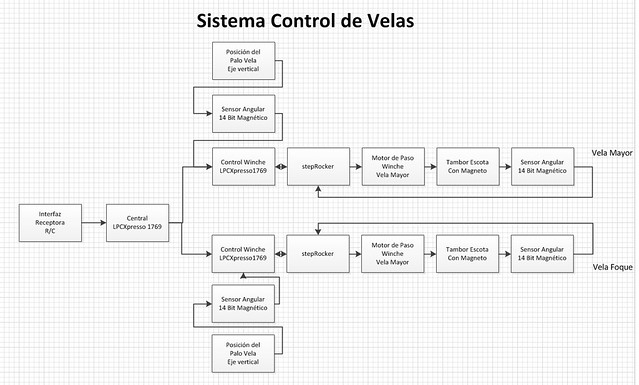
Aquí un diagrama en bloques que resulto de mi esfuerzo en múltiples iteraciones de explicar a otro modelista en los baleares en que demonios consiste mi "sistema de control de escotas", de que componentes consiste y como estas se integran a un concepto general de la electrónica en mi velero. Quiero refrescar lo que es mi objetivo en este proyecto. El camino es el objetivo y no el completar el proyecto. A razón del proyecto me encuentro con muchas tecnologías, las que estudio y evaluo y eso así forma una línea roja que sigo.
Presentando y discutiendo mi concepto de control de escotas con muchos foristas en los 3 idiomas que usan los foros en los que participo, el inglés, el alemán y el español, a la vez que reflexionando sobre detalles de la implementación mostraron que sería de mucho interés y beneficio dedicar un esfuerzo en identificar detalles de la implementación que pudieran poner en peligro su función, que impacten el consumo energético y que en detalle implementan las funciones requeridas. La metodología se llama diseño por modelación. En esta metodología se usan herramientas disponibles, en mi caso Matlab y Simulink, que permiten modelar el sistema y su función a la vez que el entorno con sus efectos sobre el sistema y usar la herramienta Simulink, para simular el sistema y así analizar la función y el impacto de un número de parámetros que lo afectan.
Aquí una foto de como es el sistema de escotas del original velero "Endeavour" que implementaré en mi velero:

Debido al tamaño del velero y debido a que las escotas en total van 6 veces de la cubierta al palo o viceversa, mi sistema de control de escotas tiene que ser capaz de variar el largo de la escota por 8400 mm o 8,4 metros. Debido a que estos veleros de la clase "J" usaban velas muy grandes, la fuerza del viento en las velas resulta en una fuerza bastante grande que la vela ejerce sobre la escota y como resultado el torque que tiene que ser capaz el motor de paso que uso como parte de la funcionalidad de winche es bastante grande. Claro que la función de polea que cumplen los diversos bloques reducen la fuerza y aumentan por lo tanto el trecho por el cual tengo que mover la escota.
Una crítica que recibí fue, que debido a la fricción de la escota con las diversas poleas el movimiento libre de la vela sería limitado de tal forma que la función del sistema de control de escotas haría el navegar el velero imposible. Otro aspecto que realicé durante mis diarios paseos con mi perro y las reflexiones que hago durante esos paseos era sobre como exactamente debería ser el juego de control de la escota y el movimiento del palo de la vela. Para clarificar esto tengo que explicar ciertos detalles de la función del sistema!
1. Un sensor magnético angular registra la posición del palo de la vela mayor por ejemplo. No conozco la expresión correcta en español para lo que en inglés se llama "gooseneck". Es el eje que conecta el palo de la vela mayor por ejemplo al mástil permitiendo su giro alrededor del eje vertical. En mi sistema el palo está unido fijamente a un eje y este se prolonga hasta casi tocar la superficie de la cubierta
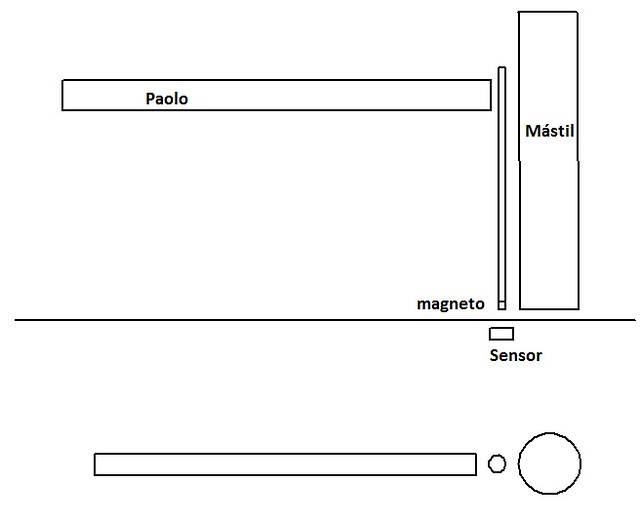
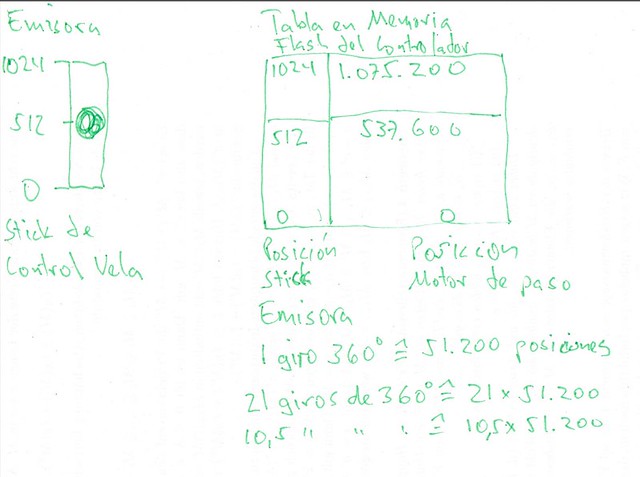
Creo que este gráfico ayuda entender. Como indica el gráfico el eje al cual se encuentra unido el palo de la vela de forma fija gira de acuerdo como el palo gire. Esto hace girar el magneto, cuyos 2 polos se encuentran en los polos laterales, lo que permite al sensor angular magnético registrar el giro del magneto con 12 bits o 4096 posiciones en un giro de 360°. Como el palo de la vela solo gira ±90° de la línea central del casco, el sensor podrá registrar 1024 posiciones del mástil hacia ambos lados. Como para el largo requerido de la escota no hace diferencia si el palo gira a babor o estribor, significa que tendremos grabado en la memoria flash del controlador una tabla con 1024 entradas. Dependiendo de la posición de la palanca de control en la emisora se define cual de estas 1024 posiciones posibles monitoreadas por el sensor angular magnético corresponde a la posición requerida por el operador como abertura máxima deseada para la vela. Digamos que la palanca esté en una posición media, lo que correspondería a la posición 512 de esa tabla. la software de control por lo tanto adaptaría el largo de la escota a la posición actual del palo y cuando esta posición actual del palo de la vela corresponde a la posición 512 entonces la software limitaría la escota al largo correspondiente, tal cual lo conocemos de controles usuales! Pero si el palo se encuentra en una posición entre la posición 512 a babor y 512 a estribor, entonces el motor de paso adaptaría el largo de la escota disponible a la requerida logrando así siempre una cierta tensión de la escota evitando así que esta se anude impidiendo el movimiento del palo de la vela.
Este sistema lo use tanto para la veöla foque, que también tendrá un palo, como a la vela mayor, por eso el diagrama de los bloques representando mi sistema consiste de 2 brazos equivalentes!
http://www.youtube.com/embed/nopezWBlDL0" onclick="window.open(this.href);return false;
El enlace a mi vídeo muestra como durante mis experimentos que he documentado en mi tutorial avanzado sobre motores de paso, que tan rápido el motor de paso puede girar. Perdonen que sea en inglés! Pero el vídeo, a pesar que muestre el movimiento del motor de paso sin carga, indica que tan rápido el motor de paso es capaz de realizar las 21 revoluciones completas requeridas para cambiar el largo de la escota por 8400 mm! Para ello estoy construyendo el tambor adecuado, que tendrá una circunferencia de exactamente 400 mm. Como el diámetro de la escota de aramid es de 0.9 mm, las 21 revoluciones no ocuparán mas de 2 niveles de escota al enrollar sobre el tambor. Por lo tanto la diferencia de la longitud de la circunferencia del tambor será negligible.
Siguen 2 fotos del tambor en construcción:


Sigo del porqué, fuera de que es fascinante, me he decidido de embarcar en la aventura del diseño por modelación! Como escribí arriba eran las criticas y advertencias de otros foristas, pero también el resultado que reflexionando sobre el sistema me he encontrado con aspectos que indican la posibilidad de que en este sistema existan mas cosas detalladas como aquella que presentaré ahora. Pero ojalá con los gráficos y el enlace al vídeo hallan podido percibir en mas detalle en que consiste mi sistema de control de escotas.
Asumamos como escribí arriba, que la posición de la palanca de control en la emisora del usuario se encuentre en la posición media, lo que equivaldría a la posición 512 en mi tabla en la memoria flash del controlador y que esto equivalga a un ángulo del palo de la vela mayor por ejemplo de 45° entre el eje central del casco y la posición del palo. Ahora sea porque el velero gire o por cambios de viento el palo se mueva en dirección del centro del casco lo que conlleva a un ángulo menor a los 45° límite a razón del control desde la emisora. En ese caso el largo de la escota sería exagerado, lo que resultaría en que perdiera una cierta tensión y que aumentaría el peligro que la escota se anude o se enganche en algún obstáculo sobre la cubierta. Esto es especialmente crítico, cuando el cambio de longitud máximo de la escota puede ser de 8.4 metros! Ahora en una primera aproximación podríamos decir que el palo girando en dirección del casco hará girar el magneto y como consecuencia el sensor angular registra que el palo se ha movido de la posición 512, lo que equivale a la mitad de las 1024 posiciones monitoreables por el sensor angular, a la posición 511 y entonces el motor de paso es activado y hace girar el tambor de la escota a la posición correspondiente. El resultado sería lo que conocemos de servos, cuando estos vibran constantemente, consumiendo así cantidades de corriente!
Para entender el entorno a esta cuestión y a las posibilidades de enfrentarlo de forma adecuada hay que considerar mas aspectos!
Primero estoy seguro que todos ustedes estarán de acuerdo si escribo que ningún operador de un radio control puede conscientemente seleccionar una de 512 posiciones de la palanca de control de la emisora entre un extremo y la mitad y que tal extremo de resolución no tiene mucho sentido. Quizá basten 256, o 128 posiciones, o 64 para permitir un control exacto de la posición de la vela! esto significa que entre posición relevante para activar el motor de paso hubieran o 2, 4 u 8 posiciones disponibles y monitoreables hacia cada lado de la posición actual.
Algo similar ocurre con el motor de paso que hace girar el tambor de escota! Un motor de paso tiene usualmente 200 pasos para un giro de 360°, o 1,8° por paso. Esos pasos se denominan pasos completos. pero como en el caso de mi placa de control del motor de escota puedo insertar hasta 256 micropasos por paso completo, entonces un giro completo de 360° equivale a 200 * 256 = 51200 micropasos, o expresado en función del ángulo, 1,8°/256=0,0070° por micropaso. Si a eso le agregamos que para las 1024 posiciones monitoreables por el sensor angular tenemos 21 giros de 360° del motor de paso, entonces la mitad serían 20,5 giros para la posición media a la posicion del palo alineado con el eje central del casco, o 1.049.600 posiciones del motor de paso.
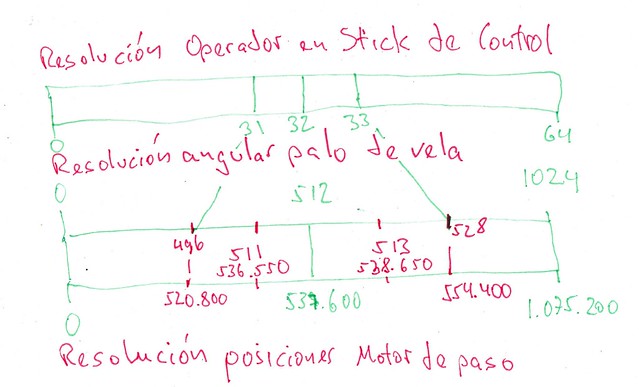
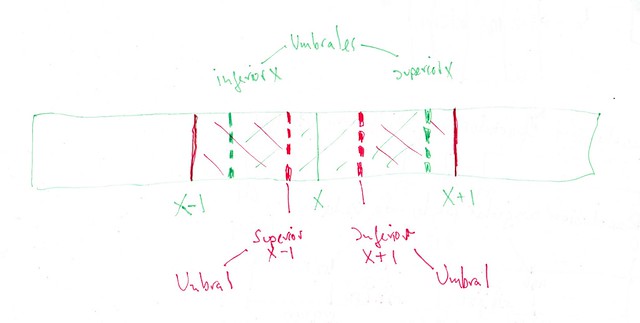
Este dibujito trata de presentar lo escrito de forma gráfica! El rectángulo verde arriba muestra el camino que puede recorrer la palanca de control en la emisora y para ilustrar el impacto de las resoluciones asume que el operador realísticamente solo puede escoger una de 64 posiciones de la palanca de control en la emisora. Claro que la emisora transmite una resolución mayor que resulta en un pulso cada 20 ms de cierto largo reflectando esa posición y el largo de ese pulso es traducido por la software en el microcontrolador a una de las posibles 1024 entradas de la tabla en su memoria flash. Si la posición de la palanca de control en la emisora realmente es la posición central o por inexactitud del operador varía por una posición usualmente realmente no tiene un efecto que se pueda percibir hasta que punto la vela se puede abrir, si es la posición no 32, sino 31 o 33. eso refleja el dibujo con las líneas correspondientes.
Miremos ahora el efecto que esto tiene en la selección de la entrada de la tabla en la memoria flash! Si realmente el usuario tiene la palanca en la posición central, entonces la software que monitorea el pulso proveniente del canal correspondiente de la receptora del radio control definiría la posición como el renglón 512 de la tabla en la memoria del flash del controlador. Pero si es 31, una menos, entonces ya mostraría al renglón 496 y si estuviera una posición mas arriba del centro, entonces se estaría indicando el renglón 528. esos valores los ven en color rojo en el rectángulo verde inferior.
Veamos que significa esto en el valor del ángulo del palo de la vela correspondiente y cuya posición es monitoreada por el sensor angular que permite monitorear 1024 posiciones del palo entre la posición central y equivalente al eje central del casco y la posición ortogonal:
90°/1024 = 0,08° entre posición monitoreada y la próxima. la posición central sería 45°, lo que equivale a la posición de la palanca en la emisora central!
Si ahora asumimos lo que en el dibujo llamo la posición "31" de la palanca de control de la emisora, entonces eso equivale al renglón 496 de la tabla en el flash, respectivamente al palo de la vela estar no en la posición 45°, sino 20 * 0,08° = 1,6° o 45° - 1,6° = 43,4°. Quiero ver al operador que sea capaz desde la orilla controlando su velero reconocer si la vela se encuentra en la posición con el palo a 45° o a 43,4°, o a 46,6°.
Pero veamos el efecto que esto tiene en la posición del motor de paso y en consecuencia en el largo de la escota! Los números en rojo muestran la posición, en número de micropasos del motor de paso que hace girar el tambor de la escota!
La posición perfecta central equivale al renglón 512 en la tabla y esto hace que el motor de paso esté en la posición 537.600. la posición resultante del renglón 496 de la tabla equivale a la posición 520.800 del motor de paso! Así pues la diferencia entre las 2 posiciones en el motor de paso es de:
537.600 - 520.800 = 16.800
Esto en el primer momento parece ser mucho, en especial considerando que la misma diferencia sería posible hacia el otro lado resultando en 16.800 micropasos adicionales! Pero veamos que cambio de longitud de escota resulta a razón de esto!
Una circunferencia completa del tambor es de 400 mm. Cada giro completo del tambor, 21 cubren el cambio de longitud máximo, consiste de 51.200 micropasos. De allí calculemos el cambio del largo de la escota a razón del giro del tambor cuando el motor de paso gira por un solo micropaso:
400 mm / 51200 micropasos = 0,0078125 mm
Ahora calculemos el cambio del largo de la escota después de 16.800 micropasos:
16.800 * 0,0078125 = 131,25 mm o 13,1265 cm
Parece mucho verdad? Pero recordemos cuantas veces la escota va entre la cubierta y el palo y que el cambio del largo de la escota máximo es de 8400 mm!
8400 / 131.25 = 64 y recordemos que esto es equivalente a 1/64 del ángulo máximo de 90° o 1,4°. así el cambio de tensión en la escota me atrevo a decir será casi imperceptible!
Pero estos datos dan la indicación sobre un posible camino para lograr educir el número de veces que el motor de paso será activado, eliminando o al menos reduciendo lo que tradicionalmente se conoce como el problema que el servo vibra constantemente. Pero eso también permite establecer una metodología de controlar cuando, si el palo de la vela gira el motor de paso debe reaccionar!
He dedicado tanto texto al análisis del entorno, de la resolución del sensor angular que monitorea la posición del palo de la vela mayor por ejemplo y al altísimo número de micropasos que el motor de paso ejecuta entre un extremo y la mitad, para ilustrar, que estas resoluciones permiten definir ciertos puntos de cuando el motor de paso es activado, sea cuando este se mueve hacia el casco o se aleje de el. Esto me permite definir umbrales superiores e inferiores dentro de una banda de giro del palo de la vela mayor de tal modo que logre un óptimo entre diversos criterios de importancia:
Encontrar tales valores de los umbrales superior e inferior en relación a la posición actual del palo de la vela monitoreado por el sensor angular, que el motor de paso es activado un mínimo y en consecuencia el consumo de energía sea mínimo y evitar que el efecto de "vibrar" tenga lugar. Por otro lado la adaptación del largo de la escota debe ser suficiente para evitar que la escota se anude o se atasque en algún obstáculo de la cubierta.
Arriba de le dedique bastante espacio para ilustrar el impacto de ciertas variabilidades, tanto debido a las limitaciones físicas del operador del radio control en notar visualmente los resultados, como en su capacidad de poder conscientemente el seleccionar el alto número de posiciones que la electrónica puede resolver y cual es el impacto absoluto tanto en el ángulo del palo de la vela como en la longitud disponible de la escota! Teniendo conciencia de lo reducido del impacto de las variabilidades sobre la posición de las velas y el largo de la escota, quiero presentar como resultó que me empezará a dedicar amplias reflexiones sobre estos temas en general y sobre las posibilidades de usar el concepto de umbrales.
Para esto hay que analizar el movimiento del palo de la vela y su movimiento angular bajo diversas condiciones durante la navegación del velero y ciertas maniobras!
Empecemos en analizar por donde partí para reflexionar sobre el tema. La vela se encuentra en una posición donde el ángulo del palo es menor al máximo permitido a razón de la posición del stick de control en la emisora. para beneficiarnos de los datos detallados arriba, asumemos que el stick de control esté en la posición central, lo que equivale al renglón 512 de la tabla en la memoria flash del controlador. Esto significa que el palo no está permitido de girar hacia un ángulo mayor de 45°! Asumemos que el ángulo actual, monitoreado por el sensor angular sea de 40°, lo que implica que el motor de paso se encuentra en la posición que resulta del renglón correspondiente a la posición 40°. En esta posición el largo de la escota es tal, que el palo no puede girar hacia un ángulo mayor a 40°!
Ahora digamos que el viento se vuelve mas fuerte o gira en relación al velero y desea abrir el palo en dirección de un ángulo mayor que 40°! Pues eso no será posible, la escota se opone a ello! eso significa que el sensor angular nunca será capaz de monitorear un ángulo mayor de 40° y por lo tanto el motor de paso no va a soltar mas escota! Pues aquí un problema que tiene que ser resuelto! y allí es donde entran a jugar los "umbrales"!
Si el ángulo monitoreado por el sensor angular sobrepasa el umbral inferior relacionado a la posición "x+1" moviéndose en dirección a la posición "x+1", aumentando el valor del ángulo y el ángulo actual es inferior al ángulo límite definido por la posición del stick de control en la emisora de operador, entonces el motro de paso girará a la posición "x+1". eso significa que los umbrales inferior y superior relacionados a la posición "x+1" tomarán el lugar de aquellos anteriormente denominados "x"! Ahora el largo de la escota es mayor, lo que hace posible que el palo de la vela continue girando en dirección del valor límite relacionado al renglón 512 que resulta por el comando del operador! Problema resuelto! la pregunta y lo que queda por resolver es como debo seleccionar el valor de los umbrales que definen la variabilidad del movimiento del palo, para que por un lado el accionar el motor de paso ocurra la menor cantidad de veces para así economizar el consumo de energía y por otro lado evitar que el largo de la escota suelta, mientras el palo gire en dirección opuesta hacia el umbral inferior.no permita que la escota se anude!
Un análisis similar hice con el giro del palo de la vela hacia el centro del casco. Lo mismo es la cuestión como funciona este método con un velero haciendo una de las 2 posibles maniobras de giro y que tan rápido esto puede hacerse y que torques ocurren! Lo que muy pronto en mis estudios preliminares sobre la metodología de diseño por modelación y mi estudio de las funcionalidades de Simulink demostraron es, que el encontrar los valores óptimos de tales parámetro bajo objetivos bien definidos es el fuerte de esa metodología!
Pero lo que también realicé en ese contexto fue por un lado que esto me permitía entender de mejor forma las objeciones que había recibido de diversos foristas, pudiendo simular los efectos como el de la fricción de la escota en los bloques de las polea y los efectos de resistencia al movimiento de la escota bajo el efecto de la presión del viento sobre la vela también por efectos electrostáticos entre la escota y los tubos.
Pero también apareció la clara imagen que el sistema podría tener aspectos adicionales con efectos que impactan el como realizar el diseño físicamente y el diseño de la software de control y de los que no tengo noción aún! Así modelar el diseño me permite captar posibles aspectos aún no percibidos similares como aquel que acabo de describir!
Esto es algo, para lo cual la simulación de la función es el instrumento adecuado y lo que, porque las funcionalidades se describen por medio de las matemáticas, es posible resolver ecuaciones de forma simbólica o numérica para identificar los valores de los umbrales mas adecuados para lograr un mínimo en el consumo de energía. Eso es exactamente para lo que las herramientas Matlab y Simulink son ideales.
Habiendo realizado esto me conseguí el acceso a esas herramientas en la empresa de un amigo que tiene las licencias y ademas empecé las investigaciones correspondientes en el internet. Muy pronto realicé, que en los últimos casi 40 años mis conocimientos matemáticas han erosionado mucho y que también en la ciencia, sea de las matemáticas,o sea de ingeniería y hasta de física los avances han sido impresionantes.
Pero también realicé, que el Internet hace posible acceder a vastísimas fuentes de información y que en especial en Alemania, donde casi todas las Universidades son públicas y de excelentísima calidad, muchas lecturas de profesores universitarios en los mas diversos cursos de las mas diversas carreras universitarias son accesibles por Internet en forma de videos de forma gratuita, de los textos que acompañan esas lecturas, de las hojas de ejercicio y las soluciones, al tiempo que exámenes antiguos con sus soluciones.También existen ofertas similares pero no tan extensas de universidades de habla hispana o del inglés, como por ejemplo de la MIT en Boston! Pero también muchos libros científicos y técnicos son disponibles por el Internet de forma o gratuita o económica.
Así pues investigue a profundidad la carrera de ingeniero electrónico de la universidad técnica de Munich, descargándome los materiales que indiqué arriba. Como por razón de salud mi capacidad de aprendizaje es limitada, una de las cosas que necesito empezar es el volver a aprender a aprender! pero también noté que no sería capaz de estudiar todas las materias requeridas por semestre. Como consecuencia por un lado me informé visitando los institutos correspondientes de la universidad, donde el que tuviera el valor de meterme a estudiar a mi edad y con mi salud me habría puertas por simpatía dándome acceso a valiosas informaciones. Pero también llegue al resultado que todas las materias del estudio de ingeniería electrónica basan en entender y saber usar lo que se enseña durante los primeros 4 semestres de la carrera del bachelor de electrónica o los primeros 2 semestres en la carrera del bachelor de matemáticas, análisis, álgebra lineal y matemáticas numéricas y discretas. También tuve la ocasión de escuchar lecturas universitarias grabadas en vídeo por Internet. El resultado fue, que un profesor Groh de la universidad de Tübingen daba las clases de Análisis basadas en la metodología rigorosa de un profesor Terence Tao de la UCLA y que esta metodología hace buen juego con mi forma meticulosa que creo ya muchos de Ustedes han tenido su problema con esa forma de pensar mía! El profesor Groh basa su curso de Análisis en la metodología de Terence Tao y que este aplica en su clase de Análisis "with honors", lo que es el término inglés para clases de alto nivel!
Así empecé en considerar el inscribirme al curso de electrónica de la universidad técnica de Munich, contacté esta universidad y me deje asesorar. El resultado fue que me conseguí las notas de las lecturas de todos los cursos de los primeros 2 años de la carrera de electrónica para el Bachelor. Como por razones de salud no soy capaz de rendir lo que los estudiantes universitarios tienen que rendir para no ser expulsados, muy pronto realicé que participando en las lecturas grabadas en vídeo y disponibles por Internet sería hasta mejor que participar físicamente en las lecturas en la universidad y que aprendiendo autodidactamente para poder pasar los exámenes de todas las materias de los primeros 2 años disponibles en el Internet de años anteriores bajo condiciones dadas en los exámenes, sería sensato inscribirme recién entonces.
Pero muy pronto realicé que prácticamente en todos los cursos de la carrera de electrónica las matemáticas, Análisis, Álgebra Lineal, matemáticas discretas y numéricas eran pre-requisito para poder concentrarse en adquirir los conocimientos ofrecidos en los diversos otros cursos que conforman la carrera y de sistemas de control en especial que voy a requerir para mi diseño por modelación de mi sistema de control de escotas.
Y como es válido en nuestra afición, buena herramienta fomenta buen trabajo, como pude realizar que en especial los estudios de Análisis que mas adecuados me parecen a mi forma de estudiar son aquellos de nivel avanzado, llamados en inglés "with honors"! Así pues me aventuré a investigar en que consiste la carrera del bachelor de matemáticas en la universidad técnica de Munich! Realicé que en esa carrera los primeros 2 años consisten de esos cursos de matemáticas mencionados arriba, mas una materia adicional, para la cual se permite que esta sea física. Como parte de mis investigaciones sobre la carrera de electrónica, física era parte de ella encontré al profesor Dr. Schuller de la universidad de Darmstadt, que hace accesible sus lecturas de mecánica teórica, lo hace de forma muy emocionante e interesante y contactándolo recibí un fuerte apoyo. mecánica es definitivamente aquel campo de la física que para mi objetivo del modelar el sistema de control de escotas, lo que incluye el modelar el impacto del entorno físico en el comportamiento de mi sistema de control de escotas, es de mucho valor. Lo que se suma a ello y aumenta el atractivo para mí es su metodología de usar variedades de topologías cada vez mas avanzadas para ir penetrando en las implicaciones de las leyes de Newton y expresarlas de forma mas clara y rica en sus implicaciones. En especial el usa el espaciotiempo y la curvatura de este a razón de la gravedad para ir penetrando mas y mas en las leyes de Newton, 3/4 partes de ese curso cubren lo que se llama la mecánica clásica y de allí sigue de forma consistente a incluir la mecánica cuántica y relacional. Así fuera de adquirir los conocimientos de física requerida para el bachelor de electrónica, pre-requisito para los cursos de sistemas de control mas avanzados que forman parte del master de electrónica, me meto en una materia por la cual siempre he sentido una cierta afición!
No os parece increíble, que después de llevar casi una década con mi proyecto el velero, ahora de pronto vuelvo a estudiar y realmente me animo a meterme en las matemáticas de esta forma! Soy honesto! Al momento estas investigaciones preliminares y el estudio de estas primeras lecturas de análisis no me han desanimado. Pero mi salud, mis problemas con la concentración a razón en especial de los paros cardíacos y sus consecuencias son potencialmente aspectos que me limitarán. Pero el cerebro es como un músculo y ejercitándolo este se puede reorganizar y arreglar los problemas que actualmente experimento. Pero por el camino, y eso lo vivo todos los días, el estudiar las materias me es un gran placer! eso es lo que cuenta en una afición!
Pero al mismo tiempo, cuando me canso estudiando tengo tantos frentes en mi proyecto alternativos, que siempre sigo avanzando en esos!
Actualmente estoy preparándome a continuar con mis experimentos con el motor de paso pudiendo usar para eso mi flamante y nuevo laboratorio electrónico! estoy investigando al momento por que canal consigo de forma mas económica una placa de evaluación del sensor angular y ademas he encontrado una nota de aplicación de la empresa Trinamic, cuyos componentes uso para el control de mi motor de paso para el control de escotas. Esta nota describe como usar 2 motores de paso equivalentes, uniendo sus ejes de forma fija, para ejercer torque sobre el uno y así poder analizar el comportamiento y definir los parámetros de sus funciones de "stallGuard" y "coolStep" que permitenaumentar la eficiencia, también energética del uso de motores de paso, logrando por un lado el hacer disponible hasta 120% del torque máximo para encargar máximos de solicitación y por otro lado reducir el consumo energético de un motor de paso por hasta el 75%, adaptando el flujo de corriente para hacer disponible solo aquel torque que se necesite realmente en un cierto momento! Ya presentaré esto como vaya avanzando!















