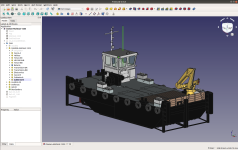
Llevo un tiempo trabajando en un nuevo modelo. El Damen modular Multi Cat 1205.
Es un pequeño barco de trabajo de uso general, como manejo de anclas, soporte de dragado, remolque y inspección. El casco consiste en dos módulos del mismo tamaño que los contenedores ISO, que son fácilmente transportables a bajo costo. Todo el equipo de cubierta es extraible y puede transportarse en contenedores separados. Tiene unas dimensiones de 12m de eslora y 5m de manga. La propulsión consiste en dos hélices de paso fijo con tobera.
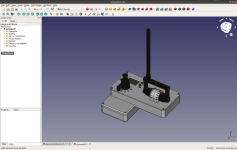
He elegido este modelo por su sencillez ya que mi intención es utilizar el software de CAD Freecad (https://www.freecadweb.org) para para el diseño del modelo y posteriormente construir las piezas con la impresora 3D. Es un software que no había usado antes y, como todos, tiene su curva de aprendizaje pero finalmente lo tengo prácticamente terminado.
He decidido construir el modelo a escala 1:32 lo que nos da una eslora de 400mm y una manga de 165mm y un desplazamiento de unos 2,4kg.
Para la electrónica del barco he pensado en dos motores 360 junto con un controlador de motores de DF Robot L298N para la propulsión. Un servo estándar HD 3001HB para el timón. Un controlador Adafruit Feather M0 RFM96 que lleva un módulo de radiofrecuencia incluido como receptor. Para la alimentación una batería LIPO de 7,4V y 4000mAh y un regulador de voltaje a 5V para el servo y el controlador.
La electrónica del control remoto será un controlador Adafruit Feather M0 RFM96 igual al del barco, 3 potenciómetros (uno para el timón y 2 para los motores) y una Adafruit mini tft Featherwing con una pequeña pantalla tft de 160x80 pixeles, un joystick digital y dos botones para poder modificar la configuración y monitorizar la carga de las baterías. Para la alimentación uso una batería LIPO de 3,7V y 3000mAh.
como siempre cualquier cuestión o sugerencia será bien recibida.
Un saludo.
Alberto.
Es un pequeño barco de trabajo de uso general, como manejo de anclas, soporte de dragado, remolque y inspección. El casco consiste en dos módulos del mismo tamaño que los contenedores ISO, que son fácilmente transportables a bajo costo. Todo el equipo de cubierta es extraible y puede transportarse en contenedores separados. Tiene unas dimensiones de 12m de eslora y 5m de manga. La propulsión consiste en dos hélices de paso fijo con tobera.
He elegido este modelo por su sencillez ya que mi intención es utilizar el software de CAD Freecad (https://www.freecadweb.org) para para el diseño del modelo y posteriormente construir las piezas con la impresora 3D. Es un software que no había usado antes y, como todos, tiene su curva de aprendizaje pero finalmente lo tengo prácticamente terminado.
He decidido construir el modelo a escala 1:32 lo que nos da una eslora de 400mm y una manga de 165mm y un desplazamiento de unos 2,4kg.
Para la electrónica del barco he pensado en dos motores 360 junto con un controlador de motores de DF Robot L298N para la propulsión. Un servo estándar HD 3001HB para el timón. Un controlador Adafruit Feather M0 RFM96 que lleva un módulo de radiofrecuencia incluido como receptor. Para la alimentación una batería LIPO de 7,4V y 4000mAh y un regulador de voltaje a 5V para el servo y el controlador.
La electrónica del control remoto será un controlador Adafruit Feather M0 RFM96 igual al del barco, 3 potenciómetros (uno para el timón y 2 para los motores) y una Adafruit mini tft Featherwing con una pequeña pantalla tft de 160x80 pixeles, un joystick digital y dos botones para poder modificar la configuración y monitorizar la carga de las baterías. Para la alimentación uso una batería LIPO de 3,7V y 3000mAh.
como siempre cualquier cuestión o sugerencia será bien recibida.
Un saludo.
Alberto.