Hola a todos/as:
Os presento mi último trabajo: el submarino 212A U31 con una eslora de 1,22 metros y una altura de 26 centímetros. Su peso actual es de ocho kilos a falta de trimar y equilibrar en el agua. El casco está hecho en fibra de vidrio y epoxy gracias a Pedro Gómez que realizó el trabajo. He dividido el submarino en tres zonas internas separadas por dos tapas hechas de fibra de carbono; la primera zona es la de popa con el alojamiento del motor de hélice y servos de timones; la segunda zona es la del compartimento de inundación; y la tercera zona es donde van alojados todos los elementos electrónicos.
Cada una de las tapas de fibra de carbono poseen una abertura, una de ellas es por donde se fuerza la ventilación y la otra es para la salida del aire del interior del submarino a la vez que se carga la batería para evitar la acumulación del hidrógeno en la última fase de la carga. Construí hace tiempo con un par de ventiladores de ordenador puestos uno encima del otro y atornillados entre sí para que las aspas de los dos giren en la misma dirección y luego un enchufe con un transformador para la corriente de 220 voltios de casa para alimentar dichos ventiladores. De ésta forma no será necesario abrir las tapas cada vez que deseemos cargar las baterías.
Los cuatro timones de popa están movidos por cuatro micro-servos de la marca Multiplex con rodamientos y a través de la emisora se mueven siempre los cuatro a la vez, ya sea para la dirección, para la profundidad o la combinación de ambos. Esto le proporciona al submarino una doble actuación de timones en cuanto a minimizar el radio de giro o inmersión; recordemos que cuando la hélice está por detrás de los timones, el giro suele ser muy amplio, al contrario que cuando la hélice está delante de los timones.
El motor es un 540 de Engel-Modellbau de 12 voltios que proporciona 4.000 revoluciones por minuto y es directo a la hélice, de tal forma que siempre tendremos algo más de motor en el caso de que el submarino vaya a topar con algún imprevisto (un borde de piscina, por ejemplo). Lleva incluído un antiparasitario de Engel-Modellbau con muy buenos resultados y un disipador de calor de aluminio.
Para el sistema de inmersión me he decantado por una bomba peristáltica. La bomba peristáltica es la que utiliza el submarino Neptune SB1 de Thunder Tiger; barata, fiable, sencilla, precisa y con un consumo mínimo.
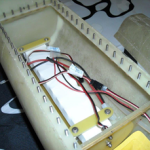
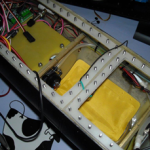
He situado en la proa 3 bandejas de fibra de vidrio; en la primera, y que está alojada en la parte más baja del casco, contiene la batería, en éste caso 10 elementos de Niquel Cadmio que proporcionan 12 voltios. El hecho de elegir ésta batería es para abaratar costes, ya que tenía una batería en desuso y me vino de lujo para éste proyecto. En la segunda bandeja y situada por encima de la batería está situado el circuito para detectar la entrada de agua en el submarino, un circuito que comercializa Cebek (el I-6), el zumbador acústico que sale del relé del I-6, el receptor de la emisora, la clema de unión del polo positivo y del polo negativo de la batería al resto de componentes que necesitan ser alimentados por corriente, dos fail-safe; uno sirve para detener el motor de la hélice y el otro para mandar la orden a la bomba peristáltica de desalojar el agua. Otro de los circuitos puestos en ésta bandeja es de la casa Robbe y nos hace la función de poder invertir el sentido de giro del motor de la bomba de agua, de tal forma que con uno de los sticks de la emisora introducimos o desalojamos agua en la bolsa prevista para tal fin. Por último en ésta bandeja tenemos el variador; un Novak Super-rooster. Este variador no es específico para submarinos, pero cuando yo corría con coches eléctricos, éste variador era lo máximo, ni siquiera tiene límite en el bobinado de los motores y por lo tanto el calor que genera es mínimo a la hora de montarle un motor de hélice de 4.000 r.p.m., es una pena que Novak ya no lo fabrique, pero el que tenga curiosidad por ver las características técnicas de éste variador las puede ver en alguna web de las que circulan por ahí…
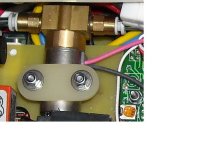
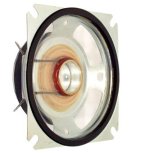
En la tercera bandeja, alojada en la parte más superior, he situado el interruptor magnético (que nos permitirá encender o apagar el submarino simplemente pasando un imán de neodimio), las baterías de alimentación del receptor, el fusible principal, las 2 válvulas para introducir el aire con un compresor para el lanzamiento de los dos torpedos con sus respectivos circuitos electrónicos y sus dos bombas de aire que actúan evidentemente desde la emisora. En la parte de proa, en la zona inundable, están alojados los dos tubos lanzatorpedos. También aloja ésta bandeja un dispositivo electrónico que sirve para en un futuro dotar al submarino de sonido (sonar, motores, etc.). Este dispositivo está conectado a la corriente y a la vez al altavoz, alojado en la bandeja de fibra de carbono de popa, y es especial para que el agua no le afecte.
Lógicamente, también podremos encender las baterías del receptor desde la parte externa con un imán; cuando el imán está situado en su lugar, las baterías no están activas y cuando el imán se quita, al tener un interruptor reed, se activan.
Un pequeño detalle es el servo waterproof de Hitec, que se sitúa en la bandeja de proa y que su función es la de subir o bajar los periscopios. Esta función también es realizada a voluntad desde la emisora. El sistema es simple: una pequeña bandeja de fibra de vidrio en donde se alojan los distintos elementos (periscopios, antenas, etc.) y que con dos columnas de latón hace que suba o baje con el servo de Hitec. Todavía no lo he metido en el agua, por lo tanto no conozco el aguante del servo en cuanto a la presión. Cierto es que Hitec presentaba éste servo dentro de un vaso lleno de agua y eso me hizo confiar en que realmente es estanco. De todas formas, y si éste sistema no funciona bien dentro del agua, siempre se puede cambiar poniendo un pequeño motor (o dejando el motor de un servo loco en el interior del submarino.
La tapa superior del submarino se sujeta por proa con un tetón de acero inoxidable camuflado y con un tornillo en la popa para facilitar el acceso rápido al interior.
La quilla está protegida y reforzada con una pletina de acero inoxidable de 2 milímetros para los roces con el fondo y a la vez actúa de contrapeso en la parte más baja del casco.
Bueno, yo creo que con algunas fotos que acompaño a éste relato, he descrito lo más importante de éste proyecto que con todo el cariño comencé hace tiempo y que comparto con todos los aficionados al modelismo naval y en particular a los amantes de los submarinos. Gracias de nuevo a Pedro Gómez por su aportación desinteresada y que ha sabido guiarme cuando he tenido alguna duda.
Un saludo,
Fernando.
Os presento mi último trabajo: el submarino 212A U31 con una eslora de 1,22 metros y una altura de 26 centímetros. Su peso actual es de ocho kilos a falta de trimar y equilibrar en el agua. El casco está hecho en fibra de vidrio y epoxy gracias a Pedro Gómez que realizó el trabajo. He dividido el submarino en tres zonas internas separadas por dos tapas hechas de fibra de carbono; la primera zona es la de popa con el alojamiento del motor de hélice y servos de timones; la segunda zona es la del compartimento de inundación; y la tercera zona es donde van alojados todos los elementos electrónicos.
Cada una de las tapas de fibra de carbono poseen una abertura, una de ellas es por donde se fuerza la ventilación y la otra es para la salida del aire del interior del submarino a la vez que se carga la batería para evitar la acumulación del hidrógeno en la última fase de la carga. Construí hace tiempo con un par de ventiladores de ordenador puestos uno encima del otro y atornillados entre sí para que las aspas de los dos giren en la misma dirección y luego un enchufe con un transformador para la corriente de 220 voltios de casa para alimentar dichos ventiladores. De ésta forma no será necesario abrir las tapas cada vez que deseemos cargar las baterías.
Los cuatro timones de popa están movidos por cuatro micro-servos de la marca Multiplex con rodamientos y a través de la emisora se mueven siempre los cuatro a la vez, ya sea para la dirección, para la profundidad o la combinación de ambos. Esto le proporciona al submarino una doble actuación de timones en cuanto a minimizar el radio de giro o inmersión; recordemos que cuando la hélice está por detrás de los timones, el giro suele ser muy amplio, al contrario que cuando la hélice está delante de los timones.
El motor es un 540 de Engel-Modellbau de 12 voltios que proporciona 4.000 revoluciones por minuto y es directo a la hélice, de tal forma que siempre tendremos algo más de motor en el caso de que el submarino vaya a topar con algún imprevisto (un borde de piscina, por ejemplo). Lleva incluído un antiparasitario de Engel-Modellbau con muy buenos resultados y un disipador de calor de aluminio.
Para el sistema de inmersión me he decantado por una bomba peristáltica. La bomba peristáltica es la que utiliza el submarino Neptune SB1 de Thunder Tiger; barata, fiable, sencilla, precisa y con un consumo mínimo.
He situado en la proa 3 bandejas de fibra de vidrio; en la primera, y que está alojada en la parte más baja del casco, contiene la batería, en éste caso 10 elementos de Niquel Cadmio que proporcionan 12 voltios. El hecho de elegir ésta batería es para abaratar costes, ya que tenía una batería en desuso y me vino de lujo para éste proyecto. En la segunda bandeja y situada por encima de la batería está situado el circuito para detectar la entrada de agua en el submarino, un circuito que comercializa Cebek (el I-6), el zumbador acústico que sale del relé del I-6, el receptor de la emisora, la clema de unión del polo positivo y del polo negativo de la batería al resto de componentes que necesitan ser alimentados por corriente, dos fail-safe; uno sirve para detener el motor de la hélice y el otro para mandar la orden a la bomba peristáltica de desalojar el agua. Otro de los circuitos puestos en ésta bandeja es de la casa Robbe y nos hace la función de poder invertir el sentido de giro del motor de la bomba de agua, de tal forma que con uno de los sticks de la emisora introducimos o desalojamos agua en la bolsa prevista para tal fin. Por último en ésta bandeja tenemos el variador; un Novak Super-rooster. Este variador no es específico para submarinos, pero cuando yo corría con coches eléctricos, éste variador era lo máximo, ni siquiera tiene límite en el bobinado de los motores y por lo tanto el calor que genera es mínimo a la hora de montarle un motor de hélice de 4.000 r.p.m., es una pena que Novak ya no lo fabrique, pero el que tenga curiosidad por ver las características técnicas de éste variador las puede ver en alguna web de las que circulan por ahí…
En la tercera bandeja, alojada en la parte más superior, he situado el interruptor magnético (que nos permitirá encender o apagar el submarino simplemente pasando un imán de neodimio), las baterías de alimentación del receptor, el fusible principal, las 2 válvulas para introducir el aire con un compresor para el lanzamiento de los dos torpedos con sus respectivos circuitos electrónicos y sus dos bombas de aire que actúan evidentemente desde la emisora. En la parte de proa, en la zona inundable, están alojados los dos tubos lanzatorpedos. También aloja ésta bandeja un dispositivo electrónico que sirve para en un futuro dotar al submarino de sonido (sonar, motores, etc.). Este dispositivo está conectado a la corriente y a la vez al altavoz, alojado en la bandeja de fibra de carbono de popa, y es especial para que el agua no le afecte.
Lógicamente, también podremos encender las baterías del receptor desde la parte externa con un imán; cuando el imán está situado en su lugar, las baterías no están activas y cuando el imán se quita, al tener un interruptor reed, se activan.
Un pequeño detalle es el servo waterproof de Hitec, que se sitúa en la bandeja de proa y que su función es la de subir o bajar los periscopios. Esta función también es realizada a voluntad desde la emisora. El sistema es simple: una pequeña bandeja de fibra de vidrio en donde se alojan los distintos elementos (periscopios, antenas, etc.) y que con dos columnas de latón hace que suba o baje con el servo de Hitec. Todavía no lo he metido en el agua, por lo tanto no conozco el aguante del servo en cuanto a la presión. Cierto es que Hitec presentaba éste servo dentro de un vaso lleno de agua y eso me hizo confiar en que realmente es estanco. De todas formas, y si éste sistema no funciona bien dentro del agua, siempre se puede cambiar poniendo un pequeño motor (o dejando el motor de un servo loco en el interior del submarino.
La tapa superior del submarino se sujeta por proa con un tetón de acero inoxidable camuflado y con un tornillo en la popa para facilitar el acceso rápido al interior.
La quilla está protegida y reforzada con una pletina de acero inoxidable de 2 milímetros para los roces con el fondo y a la vez actúa de contrapeso en la parte más baja del casco.
Bueno, yo creo que con algunas fotos que acompaño a éste relato, he descrito lo más importante de éste proyecto que con todo el cariño comencé hace tiempo y que comparto con todos los aficionados al modelismo naval y en particular a los amantes de los submarinos. Gracias de nuevo a Pedro Gómez por su aportación desinteresada y que ha sabido guiarme cuando he tenido alguna duda.
Un saludo,
Fernando.
Archivos adjuntos
-
 179.png129,5 KB · Visitas: 5.000
179.png129,5 KB · Visitas: 5.000 -
 180.png124,9 KB · Visitas: 5.000
180.png124,9 KB · Visitas: 5.000 -
 223.png132,7 KB · Visitas: 5.000
223.png132,7 KB · Visitas: 5.000 -
 224.png128,8 KB · Visitas: 5.000
224.png128,8 KB · Visitas: 5.000 -
 242.png117,8 KB · Visitas: 5.000
242.png117,8 KB · Visitas: 5.000 -
 275.png153,4 KB · Visitas: 5.000
275.png153,4 KB · Visitas: 5.000 -
 276.png143,1 KB · Visitas: 5.000
276.png143,1 KB · Visitas: 5.000 -
 309.png152,7 KB · Visitas: 5.000
309.png152,7 KB · Visitas: 5.000 -
 326.png129,2 KB · Visitas: 5.000
326.png129,2 KB · Visitas: 5.000 -
 360.png141,3 KB · Visitas: 5.000
360.png141,3 KB · Visitas: 5.000 -
 383.png140,5 KB · Visitas: 5.000
383.png140,5 KB · Visitas: 5.000 -
 420.png137,9 KB · Visitas: 5.000
420.png137,9 KB · Visitas: 5.000 -
 435.png111,3 KB · Visitas: 5.000
435.png111,3 KB · Visitas: 5.000 -
 442.png139,5 KB · Visitas: 5.000
442.png139,5 KB · Visitas: 5.000 -
 449.png143,1 KB · Visitas: 5.000
449.png143,1 KB · Visitas: 5.000 -
 453.png153,2 KB · Visitas: 5.000
453.png153,2 KB · Visitas: 5.000 -
 454.png124,7 KB · Visitas: 5.000
454.png124,7 KB · Visitas: 5.000 -
 413.png124 KB · Visitas: 5.000
413.png124 KB · Visitas: 5.000 -
 414.png125 KB · Visitas: 5.000
414.png125 KB · Visitas: 5.000 -
 417.png121,9 KB · Visitas: 5.000
417.png121,9 KB · Visitas: 5.000