Hola a todos.
Por favor utilizar este hilo solo y exclusivamente para temas relacionado con lo aquí expuesto, así quedara más o menos claro por si alguno lo quiere seguir.
gracias
Abro este hilo para compartir mi experiencia con los servos aunque no es mucha seguro que alguno que empiece en este mundo le podría servir de algo.
Como ya dije en algún lugar de este foro yo no tengo emisora comercial, la mía por decirlo de alguna manera es “rarita”, suelo trabajar con registros para comunicarme .Vosotros dependéis del fabricante que es quien diseña el sof que lleva vuestro equipo.
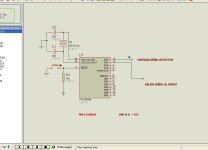
Dicho esto vamos a ver como dichos fabricantes acondicionan la señal a la salida de vuestro receptor que es la parte que nos interesa.
A la salida de cada canal del receptor llegan constantemente tres pulsos que no son otros que la posición en que tengáis el stick de la emisora, esto se repite cada 20 ms (ciclo). Que es la frecuencia de trabajo de la emisora 50hz.
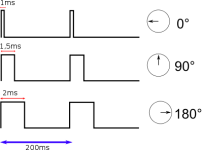
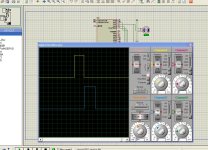
Los pulsos tienen una duración distinta para cada posición del stick con lo cual le podremos decir al servo donde debe detenerse (adjunto foto).
Cada fabricante tiene un ancho de pulso diferente aunque todos coinciden en el punto central de stick (punto neutro) que es de 1,5ms.
Para los distintos proyectos realizados aquí tomare de referencia los de futuba que son:
0.9 ms para el mínimo (0º)
1.5 ms centro (90º)
2.1 ms máximo (180º).
Aunque ya veremos que esos datos no son reales (eso mas adelante) .
Sé que esta parte es tediosa pero imprescindible para seguir adelante.
CONTINUARA……
Por favor utilizar este hilo solo y exclusivamente para temas relacionado con lo aquí expuesto, así quedara más o menos claro por si alguno lo quiere seguir.
gracias
Abro este hilo para compartir mi experiencia con los servos aunque no es mucha seguro que alguno que empiece en este mundo le podría servir de algo.
Como ya dije en algún lugar de este foro yo no tengo emisora comercial, la mía por decirlo de alguna manera es “rarita”, suelo trabajar con registros para comunicarme .Vosotros dependéis del fabricante que es quien diseña el sof que lleva vuestro equipo.
Dicho esto vamos a ver como dichos fabricantes acondicionan la señal a la salida de vuestro receptor que es la parte que nos interesa.
A la salida de cada canal del receptor llegan constantemente tres pulsos que no son otros que la posición en que tengáis el stick de la emisora, esto se repite cada 20 ms (ciclo). Que es la frecuencia de trabajo de la emisora 50hz.
Los pulsos tienen una duración distinta para cada posición del stick con lo cual le podremos decir al servo donde debe detenerse (adjunto foto).
Cada fabricante tiene un ancho de pulso diferente aunque todos coinciden en el punto central de stick (punto neutro) que es de 1,5ms.
Para los distintos proyectos realizados aquí tomare de referencia los de futuba que son:
0.9 ms para el mínimo (0º)
1.5 ms centro (90º)
2.1 ms máximo (180º).
Aunque ya veremos que esos datos no son reales (eso mas adelante) .
Sé que esta parte es tediosa pero imprescindible para seguir adelante.
CONTINUARA……