Pere Palma
Participante
- Mensajes
- 26
- Puntos
- 1
Saludos a todos
Abro un tema nuevo porque tras explorar el foro no he encontrado nada demasiado específico al respecto.
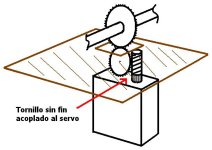
La idea ya se explica en el tema: usar servos (de lo más "normalito", por precio, ya que necesitaría varios) modificándolos quitándoles el "tope" de recorrido para convertirlos a rotación contínua (he visto varias páginas sobre esta cuestión) y usarlos en el arriado e izado de velas. He visto algunos controladores contínuos (??) que ya hacen este trabajo pero, en principio, me decantaría por los servos modificados por disponibilidad y precio. Por otro lado he visto muchos montajes a base de motores eléctricos sacados de cualquier sitio, desde radio-casets a lectores de CD/DVD (esa era mi primera idea) pero dudo de su potencia incluso montándoles una reductora, además, el trabajo con material "en serie" me facilitaría más las cosas que tener que inventar y diseñar un sistema para cada motor en concreto.
Vale, después de esta "biblia" de preámbulo la duda -y la consulta-
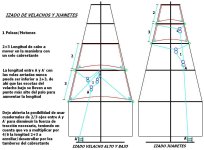
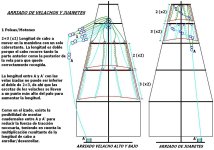
Partiendo (en el caso más extremo) de que alguna vela cuadra podría rondar los 600cm2 y alguna triangular los 300cm2; que forzosamente el cabo debe pasar por 3 o 4 puntos de "roce" (allí donde el cabo "dobla" a través de motones y cuadernales) que aumentará la resistencia de la vela a ser "arrastrada"; y que así mismo y siempre que sea posible voy a hacer uso de cuadernales "funcionales" (o eso espero) para reducir la potencia necesaria...
¿...lo veis factible?
Sobre papel -literalmente-, con un foque de unos 300cm2 y usando cuadernales de 3 ojos me sale una longitud de cabo de unos 360cm a "mover". Desconozco completamente la fuerza que podría necesitar pero, a ojo (muy muy a ojo) sosteniendo unas pesas que tengo de 2Kg (4Kg total) se me hace difícil pensar que un servo de 6Kg*cm y unos 11€ no pueda con la vela...
Tot i així... la duda persiste i de ahí la consulta.
Gracias a todos/as por estas fenomenales páginas
Abro un tema nuevo porque tras explorar el foro no he encontrado nada demasiado específico al respecto.
La idea ya se explica en el tema: usar servos (de lo más "normalito", por precio, ya que necesitaría varios) modificándolos quitándoles el "tope" de recorrido para convertirlos a rotación contínua (he visto varias páginas sobre esta cuestión) y usarlos en el arriado e izado de velas. He visto algunos controladores contínuos (??) que ya hacen este trabajo pero, en principio, me decantaría por los servos modificados por disponibilidad y precio. Por otro lado he visto muchos montajes a base de motores eléctricos sacados de cualquier sitio, desde radio-casets a lectores de CD/DVD (esa era mi primera idea) pero dudo de su potencia incluso montándoles una reductora, además, el trabajo con material "en serie" me facilitaría más las cosas que tener que inventar y diseñar un sistema para cada motor en concreto.
Vale, después de esta "biblia" de preámbulo la duda -y la consulta-
Partiendo (en el caso más extremo) de que alguna vela cuadra podría rondar los 600cm2 y alguna triangular los 300cm2; que forzosamente el cabo debe pasar por 3 o 4 puntos de "roce" (allí donde el cabo "dobla" a través de motones y cuadernales) que aumentará la resistencia de la vela a ser "arrastrada"; y que así mismo y siempre que sea posible voy a hacer uso de cuadernales "funcionales" (o eso espero) para reducir la potencia necesaria...
¿...lo veis factible?
Sobre papel -literalmente-, con un foque de unos 300cm2 y usando cuadernales de 3 ojos me sale una longitud de cabo de unos 360cm a "mover". Desconozco completamente la fuerza que podría necesitar pero, a ojo (muy muy a ojo) sosteniendo unas pesas que tengo de 2Kg (4Kg total) se me hace difícil pensar que un servo de 6Kg*cm y unos 11€ no pueda con la vela...
Tot i així... la duda persiste i de ahí la consulta.
Gracias a todos/as por estas fenomenales páginas
 No había visto tu post hasta esta noche.
No había visto tu post hasta esta noche.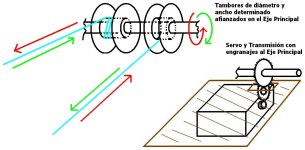
")


 pero estoy de acuerdo en que es mejor hablar con propiedad, más que nada para no confundir.
pero estoy de acuerdo en que es mejor hablar con propiedad, más que nada para no confundir. ...como veo que no has corregido mucho mis razonamientos, supongo que ya voy aprendiendo alguna cosa... :wink:
...como veo que no has corregido mucho mis razonamientos, supongo que ya voy aprendiendo alguna cosa... :wink: